
Seja bem-vind@ à disciplina ARQ5102 – Introdução prática à Ciberarqueologia: Modelagem 3D e Interatividade em tempo real ministrada por mim, Alex Martire, no Programa de Pós-Graduação em Arqueologia do Museu de Arqueologia e Etnologia da USP (mais conhecido como MAE).
Se você chegou até aqui, meus parabéns! Isso mostra o quão corajoso o seu espírito é a ponto de ter se matriculado nessa disciplina (afinal, vamos falar sobre Cibernética em um curso de Arqueologia). Espero que não se arrependa e que, principalmente, possa extrair coisas boas de nossas conversas para a sua própria pesquisa.
Aula 1 (Teoria) – A Cibernética antes da Cibernética: o perigo vem do céu
O que vem a sua mente quando escuta a palavra Cibernética?
Acredito que deva ter pensado em ao menos uma das duas opções: computadores ou robôs. O imaginário ao redor da cibernética é muito grande e sempre podemos ouvir algo relacionado ao tema em filmes, séries ou livros. “Soldado cibernético”, “crime cibernético”, “mundo cibernético”… algumas dessas palavras são quase “algo dado”, uma vez que as ouvimos ou reproduzimos com certa frequência. Contudo, o que é essa tal de cibernética? Por que ela está presente em nosso vocabulário e é quase um sinônimo de “coisas de computador” ou máquinas inteligentes/robôs? Ao longo deste curso vamos tentar responder essa questão. Digo “tentar” pois, como veremos, as conceituações variaram de década para década, desde os anos 1940 até hoje. E, além de definirmos, vamos, também, relacionar a cibernética com a arqueologia, para mostrar que a Ciberarqueologia não é meramente o “uso de computadores na pesquisa arqueológica” (mesmo que fosse, os computadores, por si próprios, são seres cibernéticos).
A cibernética é algo fascinante. É o modo como nos comunicamos com as máquinas, e elas, conosco. Escrevo esse texto graças à cibernética, e você o lê também graças a ela. Seria ela “onipresente”, “onisciente”, o ser que comanda nossas vidas? Bem, talvez seja uma questão de como encarar as coisas e, não duvido, no futuro teremos devotos de deus-máquinas (poderíamos começar pela Google, não é? Afinal, estamos tão dependentes dela…) tal como vemos em algumas obras literárias ou jogos eletrônicos como Deus Ex: Mankind Divided (recomendo que veja o vídeo abaixo, é muito bom e lida com o lado do “culto” à tecnologia!)
A “invenção” da Cibernética é comumente atribuída ao matemático estadunidense Norbert Wiener, que publicou seu livro sobre esse tema na década de 1940. Estranhamente (para o dizer o mínimo), Wiener em nenhum momento de sua obra cita toda a gama de trabalhos realizados anteriormente que, de fato, já lidava com a cibernética. Trabalhos esses, ligados às Forças Armadas dos EUA e da Grã-Bretanha.
<Acréscimo versão 2019>
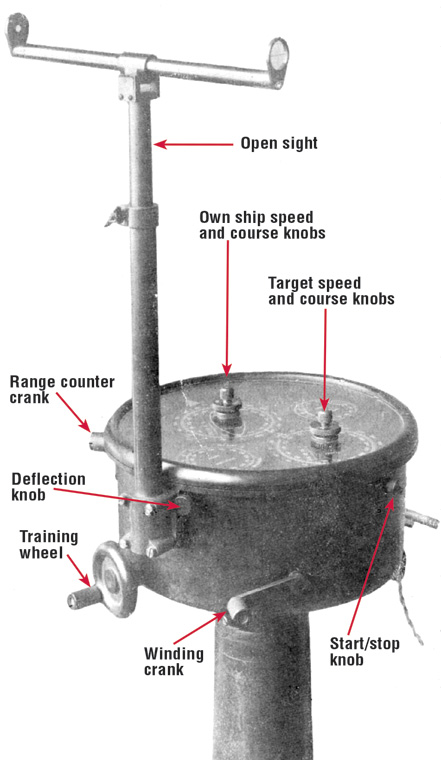
Atingir navios de batalha inimigos que navegam mudando sempre sua direção e velocidade não é tarefa fácil: existem cálculos complexos por detrás dos disparos contra inimigos e, para piorar, esses cálculos devem ser feitos no calor da batalha. Assim, não é difícil imaginar que a batalha naval durante o início da Primeira Guerra Mundial (1914-1918) foi bastante baseada em tentativas e erros, pois ainda não haviam dispositivos confiáveis que facilitassem a vida dos operadores de artilharia no cálculo de mira. Porém, em julho de 1916, o jovem inventor e empresário Hannibal Ford, fundador da Ford Instrument Company em 1915 após sair da empresa Sperry Gyroscope, mostrou aos tenentes do navio USS Texas a sua nova ideia: um sistema mecanizado de cálculos inserido em um dispositivo físico denominado rangekeeper (“sustentador de alcance”, em tradução livre). O protótipo foi muito bem aceito entre os militares, que escreveram um relatório ao Bureau of Ordnance (BuOrd) da Marinha solicitando um contrato – no mês seguinte, a empresa de Ford cotou um preço de $100.000 à Marinha para entregar nove dispositivos rangekeeper dentro de oito a dez meses. Desse modo, a Ford Instrument Company, uma empresa privada, se tornou uma das primeiras companhias a trabalhar com sistemas de controle de fogo dentro das Forças Armadas estadunidenses, juntamente com as empresas Sperry Gyroscope (mais tarde, Sperry Corporation), General Electric (G.E.) e Arma Engineering Company.
Os sistemas de controle de fogo tinham de resolver a questão de mirar uma arma desmembrando-a em três aspectos: percepção (olhar através do visor), integração (estimar a trajetória do alvo), e articulação (apertar o gatilho). A percepção se refere a como um sistema de controle apre(e)nde o mundo, como o enxerga: exemplos de instrumentos de percepção são os telescópios e os telêmetros (rangefinders), que coletam dados do ambiente e do inimigo e os converte para números. A integração está relacionada à memória, ou seja, armazenamento de dados após prévio processamento e filtragem de sinais. Por fim, a articulação se refere à saída (output) do sistema, efetuando uma ação concreta (como a de pressionar um gatilho para disparar a arma). O rangekeeper desenvolvido por Ford, denominado Mark 1, lidava com a resolução desses problemas em conjunto e foram vendidos à Marinha dos EUA por $8.000 cada (pouco depois, a companhia desenvolveu uma versão mais barata do dispositivo, chamada Mark 2, ou “Baby Ford”). A produção e a venda, contudo, eram secretas, e a Ford Instrument Company era proibida de trabalhar para quaisquer outros potenciais clientes (civis ou militares de outras nações).
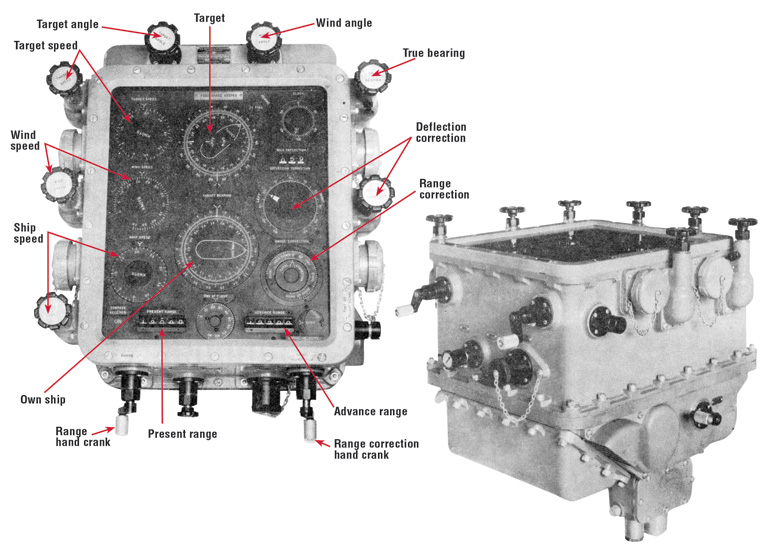
Há poucas fotografias do Mark 1 disponíveis, porém, o Mark 7, da década de 1930, nos dá uma boa ideia de como era a aparência e funcionalidade do primeiro modelo (note que todas as entradas de variáveis eram feitas por manivelas). In: https://www.usni.org/magazines/naval-history-magazine/2015/october/armaments-innovations-revolutionary-rangekeeper
Mark 2: versão mais barata do Mark 1. Também denominado “Baby Ford”. In: https://www.usni.org/magazines/naval-history-magazine/2015/october/armaments-innovations-revolutionary-rangekeeper
Em 1918, outra empresa foi sondada pelo BuOrd, a General Electric (G.E.), conhecida na época como líder em pesquisa industrial e tecnologia eletrônica de ponta. Embora não tivesse experiência anterior em controle de fogo, a G.E. ficou responsável por desenvolver um dispositivo síncrono para ser utilizado em navios de guerra. Entre 1918 e 1920, o engenheiro Edward Hewlett desenvolveu um novo sistema de controle de fogo construído ao redor de um motor auto-síncrono denominado “Selsyn“: esse sistema utilizava corrente alternada (CA, ou AC, em inglês) ao invés de corrente contínua (CC, ou DC, em inglês) para transmitir posição rotacional sobre uma distância através de três fios. Em 1920, o sistema foi implementado nos navios de guerra USS Colorado e USS Maryland. Assim como a solução da Ford, os sistemas síncronos da G.E. tiveram sucesso porque transmitiam dados sem corrupção, permitindo cálculos ainda mais complexos.
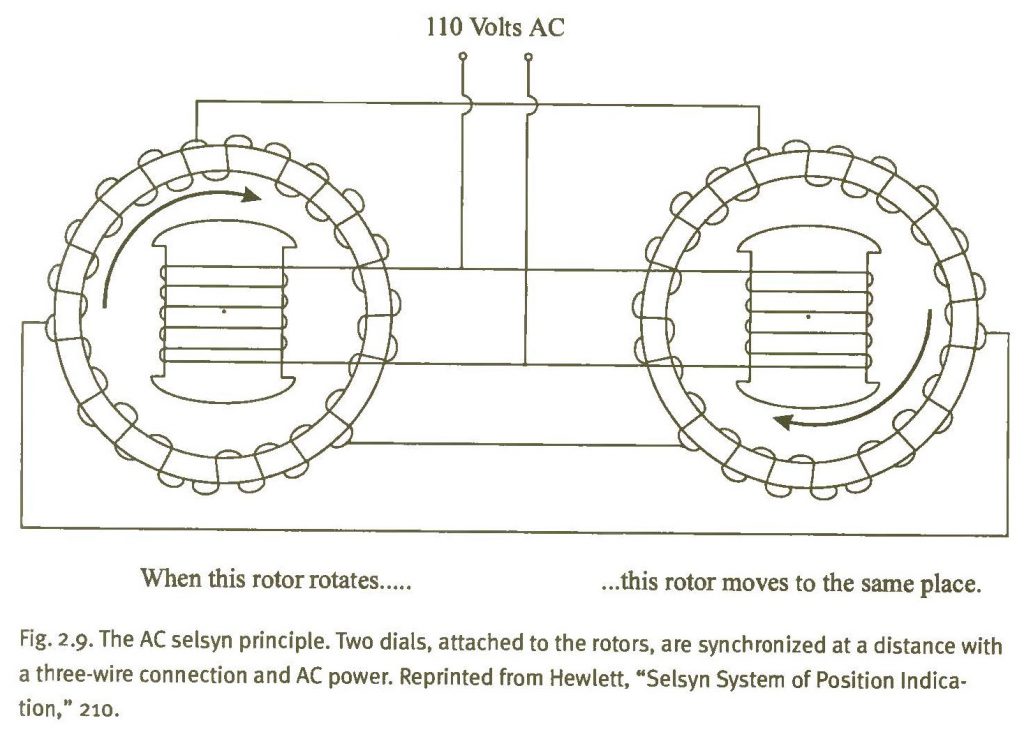
Princípio de funcionamento do motor síncrono da G.E. In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 49.
Caso tenha interesse em saber como era a instalação de um controle de fogo em navios, a figura abaixo é bastante didática:
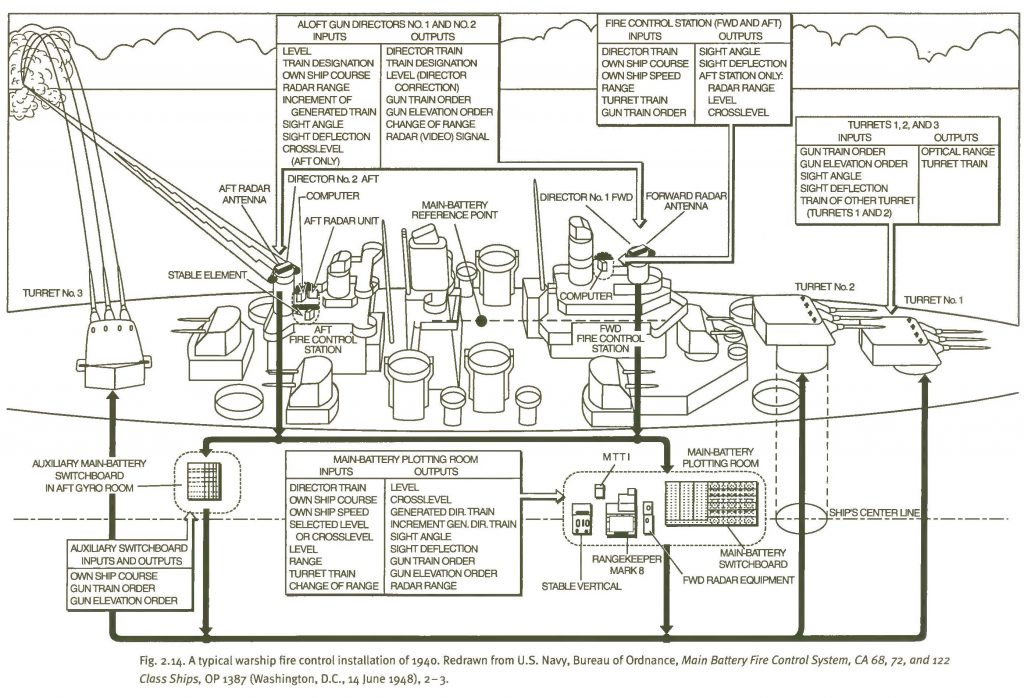
In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 58.
Os dispositivos criados pelas companhias que tinham contratos com as Forças Armadas estadunidenses foram bem sucedidos no campo da batalha naval: agora era possível fazer o rastreamento dos navios inimigos com precisão e acertá-los à distância dentro de um número aceitável de acertos. Os navios, contudo, ainda enfrentavam um grande problema, dessa vez, vindo do céu: os aviões.
</Acréscimo versão 2019>
Falar sobre a cibernética pré-Wiener é falar sobre a empresa Sperry Corporation, fundada em 1910 por Elmer Ambrose Sperry no Brooklyn, em Nova Iorque (EUA). A Sperry Corporation foi uma das principais empresas privadas que auxiliaram as Forças Armadas durante as duas Guerras Mundiais (ao lado da IBM e da RCA). Tendo como foco a produção de equipamentos bélicos, a Sperry atuou em 3 segmentos: 1) produção de pilotos automáticos para navios; 2) produção de pilotos automáticos para aeronaves; 3) sistemas de controles de artilharia antiaérea. A relação entre o governo estadunidense e a Sperry se dava da seguinte maneira: durante os tempos de paz, o governo permitia à Sperry a experimentação de tecnologias de risco e, durante a guerra, exigia (e financiava) produção em larga escala de equipamentos bélicos. O desenvolvimento de pilotos automáticos para aeronaves, por exemplo, auxiliou no controle das máquinas durante os vôos, pois o piloto podia reduzir sua fadiga em momentos de trabalho extremo ou estresse: o dispositivo atuava controlando a direção e altitude do avião, e o piloto apenas controlava esse dispositivo – em outras palavras, acontecia um laço de feedback (retroalimentação) entre o piloto (que “dizia” à máquina o que fazer) e o avião (que ajustava as coordenadas de acordo com aquilo que o piloto pedia).
O governo dos EUA, contudo, não estava interessado apenas na automatização da pilotagem: era essencial que, do solo, os soldados pudessem abater os aviões inimigos – para tanto, saber o posicionamento futuro do avião era primordial. Era como caçar patos: o caçador precisa estabelecer a trajetória da ave para atirar não onde ela está, mas, sim, onde ela estará. Esse problema da “caça aos patos” era amplificado devido à velocidade e altitude das aeronaves durante o combate. Havia, então um loop de feedback: a predição só poderia ser alcançada quando o tempo do voo fosse sabido, mas o tempo do voo dependia do ponto de mira da artilharia antiaérea que, por sua vez, era um output (saída) da predição (em outras palavras, uma coisa alimentava a reação da outra). Em 1930, após alguns protótipos, a Sperry desenvolveu o preditor denominado T-6, um computador que calculava a predição (ou seja, o local onde a aeronave inimiga estará no tempo) e a balística (ou seja, como mirar a arma de modo que a cápsula lançada exploda no momento exato em um ponto no espaço e tempo). Desse modo, a predição e a balística formavam um laço de feedback: os operadores inseriam no preditor dados referentes ao tempo estimado de viagem da cápsula quando avistavam o inimigo; o preditor usava esses dados para enviar cálculos iniciais ao estágio da balística que, por sua vez, refazia os cálculos e retornava a informação atualizada sobre o tempo de voo estimado ao preditor, permitindo o disparo preciso.
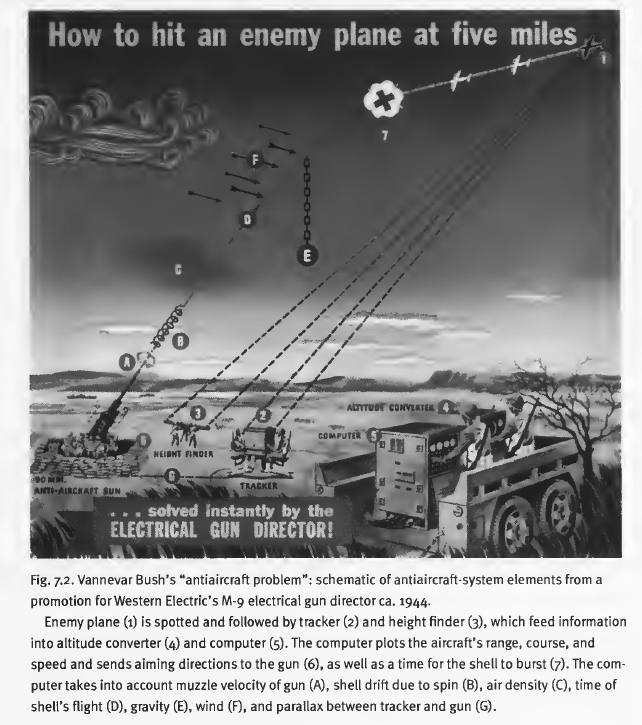
Esquema de elementos presentes em um sistema antiaéreo (note como o disparo e a detonação da munição não seguiam a mesma trajetória do avião inimigo). In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 204.
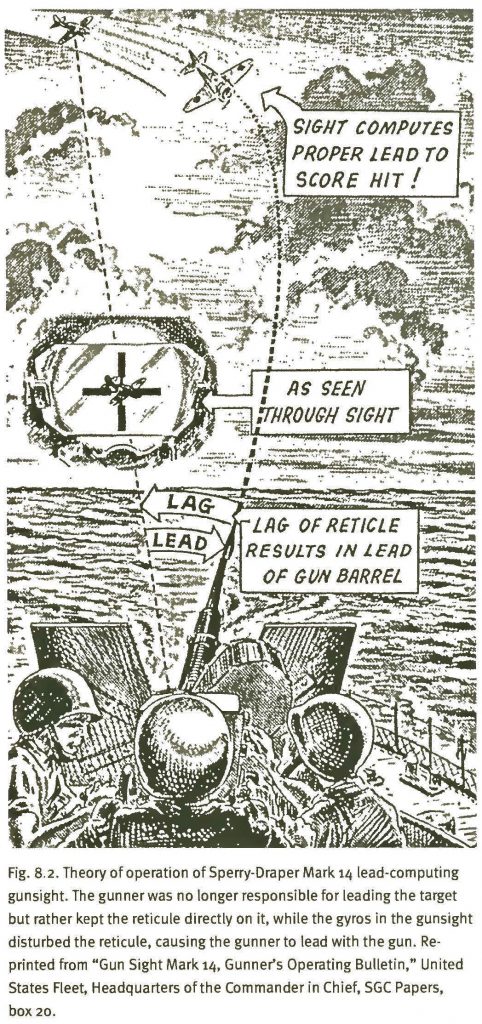
O desenvolvimento da tecnologia antiaérea fez com que houvesse mudanças no modo como os alvos eram rastreados: enquanto o artilheiro mirava o avião inimigo em seu visor (terrestre ou naval), a torreta ajustava-se automaticamente para o local em que o avião estaria no futuro (ocorrendo, então, um lag, ou seja, atraso). In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 204.
Esse vídeo deixa o assunto sobre predição e balísitca um pouco mais claro:
O papel da Sperry Corporation foi fundamental durante a Segunda Guerra Mundial (1939-1945) não apenas no solo: para elaborar armas adaptáveis aos aviões estadunidenses, a empresa contratou, em 1940, o imigrante italiano pintor de afrescos e murais Alfred Crimi, que se tornou responsável pelo design da maioria dos equipamentos da Sperry, incluindo as torretas duplas do avião B-17, posicionadas em uma esfera que girava sobre seu próprio eixo. As ilustrações de Crimi são excepcionalmente belas, como pode ver abaixo:


Em 1942, a empresa Sperry Corporation assinou contrato junto às Forças Armadas para produzir mais de um bilhão de dólares em sistemas de controle. Em 1943, o número de empregados da Sperry chegou a 32 mil pessoas. Entre 1942 e 1945, o valor dos produtos da empresa somaram mais de 1.3 bilhões de dólares.
Para além da artilharia antiaérea da Sperry, outra inovação se mostrou fundamental durante a Segunda Guerra Mundial. Em 1940, os melhores sistemas de radares não eram bons o bastante automatizar o controle de fogo contra um avião inimigo (o NDRC, National Defense Research Committee, fundado pelo presidente Franklin Delano Roosevelt em 27 de junho do mesmo ano) começou a investir para mudar essa situação). RADAR significa radio detection and ranging (detecção e localização por rádio), e seu objetivo principal era determinar distância de um objeto no espaço da estação de radar. Até 1940, os radares dos Aliados e do Eixo operavam com ondas largas, fazendo com que a resolução transmitida pelas antenas fosse muito baixa, uma vez que a distância medida era muito espaçada. Os ataques aéreos alemães aos ingleses fizeram com que os pesquisadores da Universidade de Birmingham, em 1939, desenvolvessem o magnetron de múltiplas cavidades (cavity magnetron). O magnetron passou a ser usado nos radares pois conseguia produzir ondas curtas de 10 centímetros ou até mesmo 3 cm: além de aumentar a resolução de detecção de inimigos, o magnetron permitia, graças ao seu tamanho diminuto, a mobilidade dos radares.
<Acréscimo versão 2019>
É interessante aprofundar a questão dos radares, uma vez que foram decisivos durante a Segunda Guerra Mundial e, atualmente, estão presentes em todos os controles aéreos de tráfego ao redor do mundo. Em 1941, embora os navios de guerra estadunidenses estivessem equipados com as artilharias produzidas, principalmente, pela Sperry Corporation, um ataque inimigo foi capaz de fazer com que as Forças Armadas dos EUA repensassem suas estratégias: os Kamikazes (ou camicases) japoneses eram ataques suicidas rápidos, baixos e imprevisíveis. Causar danos a um avião Kamikaze próximo ao navio de guerra não significava muito, uma vez que ele iria se chocar contra o navio do mesmo modo. Assim, era necessário abater o avião a uma distância segura. Para isso, era preciso desenvolver a tecnologia de radares móveis.
Um pouco antes do ataque Kamikaze à baía naval de Pearl Harbor em 1941, o engenheiro graduado pelo MIT Horatio Rivero foi contratado pelo BuOrd (1940) para liderar, juntamente com Samuel Tucker (o cunhador do termo radar), a equipe de desenvolvimento de tecnologia de radares. Utilizando o recém-importado magnetron britânico, a equipe de Rivero produziu alguns resultados que auxiliaram os estadunidenses na guerra, mas que ainda estavam muito aquém do desejado nos quesitos velocidade e “tiro cego” (ou seja, o radar controlando diretamente as armas para atirar automaticamente durante a noite ou durante neblinas.
Essa situação só começou a mudar em 1943, quando o Laboratório de Radiação do MIT iniciou o programa de desenvolvimento do sistema de controle de fogo Mark 56, um dos últimos contratos do NDRC para esse tipo de dispositivo. O seu radar de escâner cônico com 3 cm de comprimento de onda conseguia buscar, em uma área significativa, por alvos e, ao mesmo tempo, automaticamente rastreá-los, até mesmo em ângulos baixos. Eram necessários dois operadores no diretor no deque para fazer o rastreamento óptico e direcionarem a antena do radar: o processamento dessas variáveis era realizado em um compartimento abaixo do deque. O Mark 56 fazia todos os cálculos em um conjunto interno com um giroscópio que rastreava a linha de visão, enquanto o diretor em si, no deque, era movido por um servomecanismo. Embora bastante avançado tecnologicamente, o Mark 56 nunca chegou a ser utilizado na Segunda Guerra devido ao seu tempo de desenvolvimento. Os primeiros Mark 56 só chegaram à frota estadunidense em 1947, porém, só foram amplamente utilizados (e se tornaram padrão) nos navios da Marinha dos EUA na década de 1970.
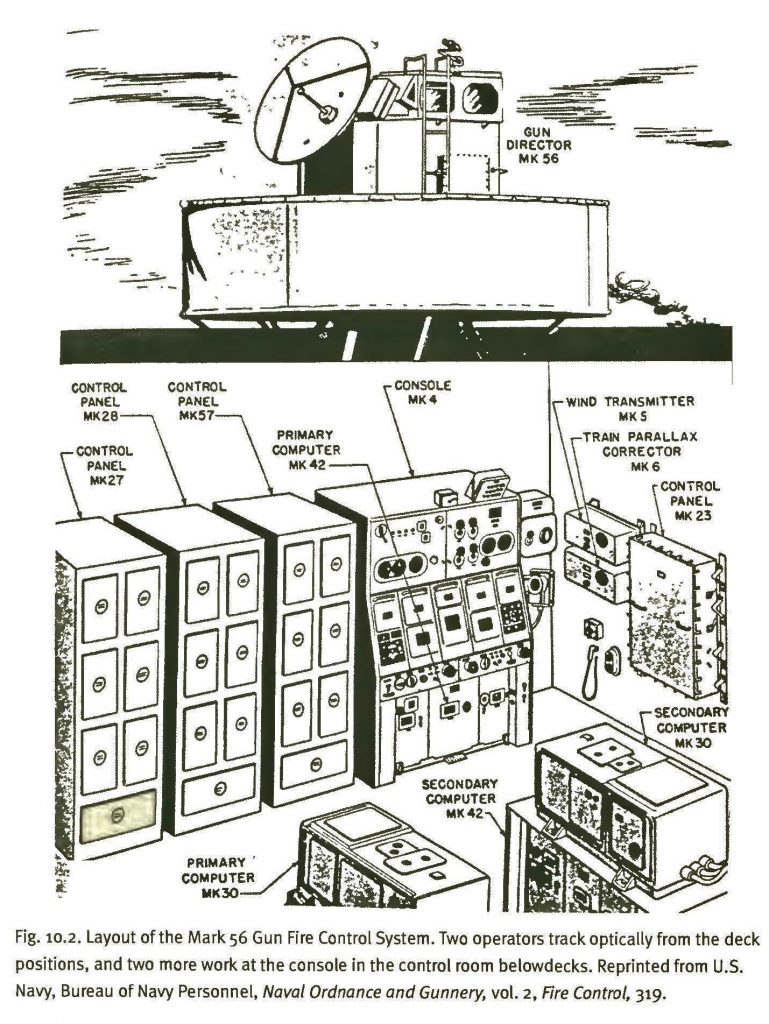
Detalhes de elementos e operação do Mark 56. In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, pp. 269, 271.
Quer saber o que havia dentro de um Mark 56? Assista a esse vídeo (note os servomecanismos dentro do dispositivo – o monte de eixos e engrenagens que faziam o trabalho mecânico antes dos componentes eletrônicos):
Para ver os equipamentos em ação, basta rodar o vídeo a seguir:
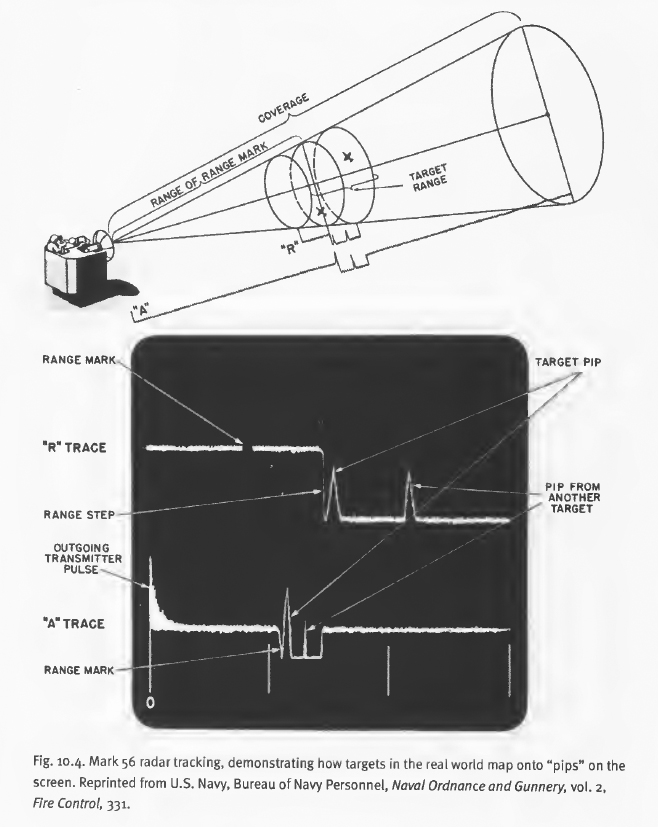
Os radares móveis também foram utilizados pelo Exército estadunidense durante a Segunda Guerra Mundial. Em 1940, o rastreamento com radar ainda era uma atividade manual: o operador via o dado em uma tela de osciloscópio e utilizava um apontador eletrônico, controlado por um volante, para selecionar o eco no radar que deveria ser o alvo – cabia, assim, aos operadores humanos a filtragem daquilo que era o sinal verdadeiro do inimigo em meio aos ruídos captados pelo radar. Para driblar esse problema, o Laboratório de Radiação do MIT começou a trabalhar em meios de automatizar o rastreamento a fim de eliminar a necessidade de um operador, manualmente, ter de identificar na tela os “pips” advindos dos inimigos.
Para substituir os “pips”, foi desenvolvido um escaneamento cônico, ou seja, a rotação da emissão do radar ao redor do eixo da antena 30 vezes por segundo, formando um cone. Essa emissão giratória podia detectar quando um alvo saia de seu centro e, assim, enviava um sinal de feedback para a antena reposicionar o alvo em seu centro novamente (em outras palavras, a antena conseguia rastrear alvos que se moviam, como aviões). Para movimentar rapidamente a antena, o laboratório do MIT adquiriu servomecanismos da empresa G.E. e, em 1941, realizou, com sucesso os primeiros testes de rastreamento em Boston. Com o aparato funcionando bem, os engenheiros montaram todo o dispositivo sobre um caminhão, para tornar o radar móvel: isso também protegia os operadores de ataques inimigos, bem como das mudanças climáticas que podem ocorrer durante campanhas de batalhas. Esse caminhão foi denominado XT-1.
O sucesso do XT-1 logo fez com que o Exército o padronizasse como o sistema de radar SCR-584, encomendando mais de mil unidades, custando cada uma cerca de $100.000 e pesando 10 toneladas (o sistema era montado em um trailer). Quando chegou aos campos de batalha, o radar trabalhou muito bem: quando um alvo era identificado, o radar conseguia rastreá-lo com acurácia dentro de um raio de 18 milhas (aproximadamente 29 quilômetros). O SCR-584 também foi decisivo para as batalhas em território europeu. Os alemães haviam desenvolvido a “bomba robô” denominada V-1, uma bomba com controle automático de voo que emulava, em sua forma, um pequeno avião. A Alemanha bombardeou Londres, a partir da costa francesa, em junho de 1944, logo após o Dia D, com quase 7.500 bombas V-1. As Forças Armadas britânicas pediram auxílio aos EUA, que enviaram a tecnologia do SCR-584, além de treinamento para os operadores. Surtiu efeito: entre 18 de junho e 17 de julho de 1944, as armas automatizadas pelo SCR-584 derrubaram 343 V-1’s (cerca de 10% do total do ataque).
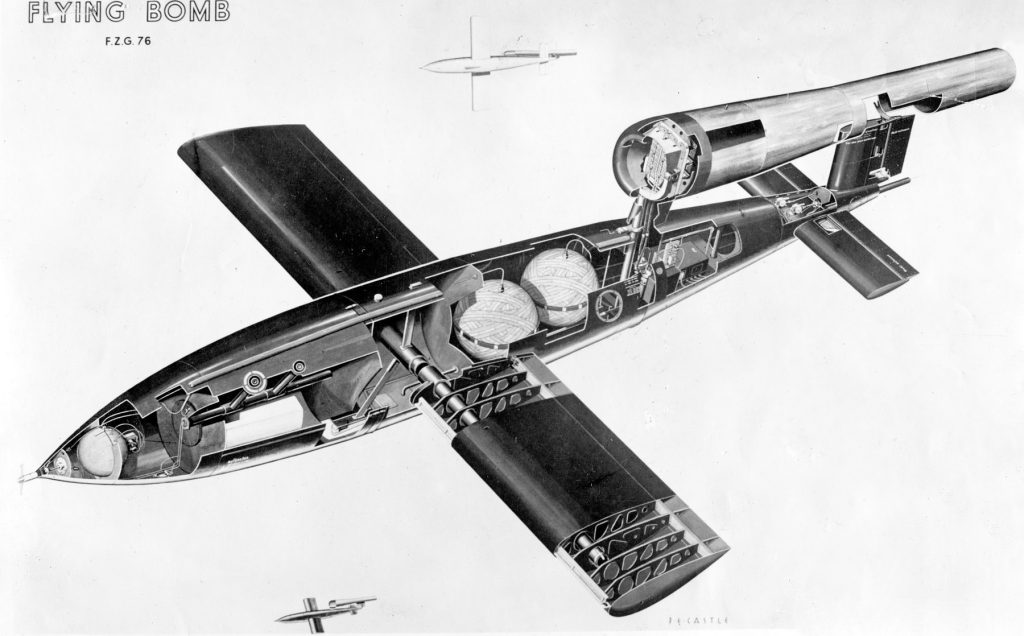
Interior de uma bomba V-1. In: https://en.wikipedia.org/wiki/V-1_flying_bomb
Mesmo bem-sucedido, o SCR-584 apresentava suas limitações. Ele dependia muito de operadores bem treinados para lidar com o rastreamento óptico, uma vez que nem sempre o radar conseguia filtrar os sinais dos alvos de outros ruídos vindos das redondezas ou de alvos muito próximos. Além disso, o radar e os visores ópticos eram montados em diferentes equipamentos: enquanto os radares ficavam dentro do trailer, os rastreadores ópticos ficavam do lado de fora.
Para saber mais sobre os radares de guerra, fica a dica:
</Acréscimo versão 2019>
Leitura recomendada
› MINDELL, David A.. Between human and machine. Feedback, control, and computing before Cybernetics. Baltimore/London: The Johns Hopkins University Press, 2002.
O capítulo 3, intitulado “Taming the beasts of the Machine Age. The Sperry Company”, oferece uma base excelente sobre a atuação da Sperry Corporation junto às Forças Armadas estadunidenses antes e durante a Segunda Guerra Mundial. O capítulo aborda algumas questões técnicas muito interessantes sobre o funcionamento dos sistemas de pilotagem automática e preditores.
› RID, Thomas. Rise of the machines. A cybernetic history. New York: W. W. Norton & Company, Inc., 2016.
O capítulo 1, intitulado “Control and communication at war”, oferece um panorama sobre a cibernética pré-Wiener. É um texto mais geral, não focando apenas na Sperry Corporation, incluindo algumas inovações britânicas durante o período da Segunda Guerra Mundial.
› Radar Operator’s Manual (RADTHREE), Radar Bulletion n. 3. Washington DC: United States Fleet, Navy Department, 1945.
Esse é para os fortes! O manual apresenta os princípios gerais de funcionamento dos radares e também descreve em pormenores os elementos técnicos de um radar.
Acesse aqui: https://www.ibiblio.org/hyperwar/USN/ref/RADTHREE/index.html
Jogo recomendado
Falamos sobre Cibernética… Falamos sobre as torretas automatizadas do avião B-17… Que tal juntarmos tudo isso na prática?!
B-17 Flying Fortress: The Mighty 8th é um simulador lançado em 2000 para computadores. A curva de aprendizado é um pouco longa, mas vale a pena.
Filme recomendado
Acredito que um dos melhores filmes sobre essa época de guerras e cibernética seja a cinebiografia de Alan Turing O Jogo da Imitação (The Imitation Game), dirigido por Morten Tyldum em 2014. Computadores são realmente fascinantes, não acha?!
Aula 2 (Teoria) – Caça os patos! A importância do feedback na construção da Cibernética
Nessa aula falaremos, finalmente, sobre Cibernética!
Sei que você não se aguentava mais de ansiedade e que passou noites em claro esperando por esse momento. Pois bem, aqui estamos: vamos caçar patos!
Se tiver a minha idade, provavelmente, jogou Duck Hunt para o Nintendinho (ou, como foi comum aqui no Brasil, em algum videogame “genérico”, similar a ele). Caçar os patos no jogo é um problema de antecipação de posição do alvo: temos de ler a trajetória da ave na tela e “adivinharmos” em que local ela estará no futuro – desse modo, miramos a arma de brinquedo não onde o pato está, mas, sim, onde ele supostamente estará. Tratando-se de caça real, o caçador experiente observa o pato voando, seus olhos enviam informações visuais por meio de nervos ao cérebro, o cérebro computa a posição apropriada para o rifle, e seus braços ajustam a posição do rifle, “predizendo” a trilha de voo do pato. Isso, como vimos na aula anterior, também foi a base para o desenvolvimento de sistemas de defesa antiaéreos durante a Segunda Guerra Mundial: a balística e a predição estiveram no cerne da produção de equipamentos pela Sperry Corporation.
Devemos, agora, ver o outro lado da guerra: aquele que foi se desenvolvendo em universidades durante esse período. Uma figura acadêmica foi central nesse contexto. Inclusive, é tida como o “pai da Cibernética”: estamos falando do matemático estadunidense Norbert Wiener, que publicou três livros sobre o tema: Cybernetics: or control and communication in the animal and the machine (1948), The human use of human beings (1950), e God & Golem, Inc.: a comment on certain points where cybernetics impinges on religion (1964).
Em fevereiro de 1940 (cinco meses após os nazistas invadirem a Polônia), Norbert Wiener passou a integrar um subcomitê no NDRC. No dia 22 de novembro do mesmo ano, submeteu ao comitê chefiado por Vannevar Bush um memorando de quatro páginas sobre a predição antiaérea: antes do Natal, seu projeto foi aprovado com financiamento. Wiener contratou, então, como engenheiro chefe de projeto, o graduado no MIT de 27 anos Julian Bigelow, que construiu um aparato no laboratório que simulava as curvas randômicas dos pilotos alemães sobre Londres durante os bombardeios. Após dois anos de pesquisa sem resultados práticos, em 1942, a diretoria do NDRC começou a ficar cética com relação ao trabalho de Wiener e, no mesmo ano, o contrato de Wiener de $2.325 dólares foi terminado sem resultados. Fato que Norbert Wiener jamais aceitou e fez questão de mencionar em seus livros publicados.
Porém, Wiener continuou seus estudos, certo de que a pesquisa sobre o controle da informação entre homens e máquinas traria benefícios ao conhecimento. No inverno de 1947, organizou um seminário interdisciplinar sobre comunicação em forma de jantares com vários cientistas (o sonho de todos nós, convenhamos). Três ideias permeavam o enfoque proposto por Wiener sobre automação e interação homem-máquina, a qual denominou Cibernética (a palavra deriva do termo grego kubernetes, ou seja, piloto, timoneiro dos navios; aquele que regula a todo instante o percurso no mar – porém, Wiener afirma em um de seus livros que só depois veio a saber que “cibernética” já havia sido usada por Ampère com referência à ciência política, no século XIX)
1) controle – o propósito principal dos seres vivos e das máquinas é controlar seus ambientes (ao invés de só observá-los), ou seja, a entropia tem papel fundamental (ela é a medida da desordem, da incerteza, degradação, e perda de informação: reverter isso requer controle por parte de um sistema sobre o ambiente);
2) feedback – a habilidade de qualquer mecanismo usar sensores para receber informação sobre sua performance atual (input) ao invés da performance esperada (quando um feedback tende a se opor a o que um sistema está já fazendo – por exemplo, fazendo um motor parar de girar a torreta ou dizendo a um termostato para desligar um aquecedor, ele é denominado ‘feedback negativo’, e geralmente serve para estabilizar um estado desejado. Para Wiener, o feedback é a propriedade de ser capaz de ajustar conduta futura por meio da performance passada);
3) relação entre homens e máquinas – o feedback promovia um sentido cinestésico para as máquinas, semelhante à consciência humana de posição ou movimento de braços e pernas (Wiener tendia a antropomorfizar as máquinas e, também, a mecanizar o homem ao usar comparações com as máquinas para entender a fisiologia humana).
Vamos aprofundar um pouco cada ponto cibernético.
- Ponto Um – Controle
É impossível falar sobre cibernética sem mencionar a entropia, uma vez que ela é o cerne da própria cibernética. Tudo tende a se perder, a se desorganizar: é o exemplo clássico da nossa querida termodinâmica, onde um corpo mais quente perderá calor para um mais frio. A entropia, assim, é a medida da desordem: quanto mais desorganizado algo estiver, maior será a sua entropia. Pense naquele seu artigo que você tem um prazo apertado e um monte de assuntos para escrever nele: no começo, tudo está uma bagunça – você tem um monte de textos xerocados espalhados pelo quarto, anotações com sua própria letra que não consegue entender, copos de café sujos largados ao lado do teclado, lenços com lágrimas de frustração ao chão… se não fizer nada a respeito, tudo tende a piorar e a bagunça, a aumentar. Mas chega uma hora em que toma vergonha na cara (geralmente devido a uma força maior denominada “desespero”), e começa a organizar tudo, incluindo seus pensamentos, para dar forma ao produto final: um artigo. Assim sendo, você conteve a entropia (por um tempo, ao menos) e gerou informações a partir da organização dela (afinal, as ideias jogadas no artigo não passam disso: informações). Parabéns, seu artigo está pronto para ser esculachado pelos pareceristas!
Artigos à parte, o controle da entropia, como dito, é a base da cibernética. Todos os sistemas cibernéticos vão trabalhar de modo a conter a desordem e, assim, dar um sentido/ação às coisas. Acredito que os seguintes vídeos possam ajudar a esclarecer essas ideias:
- Ponto Dois – Feedback
<Acréscimo versão 2019>
Existe um mito sobre a criação do conceito de feedback. Ele é atribuído a uma epifania do engenheiro da Bell Labs Harold Black que, na travessia de balsa pelo rio Hudson entre Nova Jersey e Manhatan em 1927, encarou a Estátua da Liberdade e percebeu que, se alimentasse a saída (output) de um amplificador de volta à entrada (input), mas em fase reversa, e mantivesse o dispositivo sem oscilar, conseguiria cancelar a distorção na saída. Sete anos depois, Black publicou seu trabalho sobre amplificadores, modificando o entendimento que tínhamos sobre controle de informações até então. Vamos chegar a isso em breve.
As linhas telefônicas estadunidenses do início do século XX possuíam algumas limitações técnicas. Talvez a mais impactante fosse a qualidade do sinal devido à distância entre os pontos de emissão e recepção. Os microfones de carbono permitiam que os fracos sinais acústicos viajassem ao lango dos cabos sem quaisquer tipos de ganho de sinais de ondas sonoras ao longo deles. A resistência inerente dos cabos aos sinais, causando perda de qualidade, ficou conhecida como atenuação. Uma das maneiras de resolver esse problema seria aumentar a espessura dos cabos de cobre, contudo, isso demandaria altos custos devido à reestruturação de toda a rede telefônica, principalmente no preço das ligações entre longas distâncias. Ou seja, se atualmente reclamamos quando nossos sinais de celular ou telefone ficam “pulando” ao utilizá-los, imagine como era ter de se esgoelar ao telefone e torcer para ouvir e ser ouvido no início da telefonia!
Surgia assim a necessidade de se repetir o sinal de voz ao longo das distâncias dos cabos. Esse problema foi atacado pelos engenheiros da AT&T (American Telephone and Telegraph Company), empresa fundada por Alexander Graham Bell em 1885 (que atualmente empresta seu nome ao estádio de futebol americano do meu Dallas Cowboys), na década de 1910. O desenvolvimento de repetidores, para além da famosa conversa transcontinental entre Graham Bell e Thomas Edison em 1915, fez com que houvesse uma profunda mudança conceitual: a rede agora se tornava uma máquina. As linhas telefônicas deixaram de ser meros receptáculos de energia elétrica e passaram a carregar informações. Um repetidor era um amplificador que adicionava energia e renovava o sinal em qualquer ponto da rede cabeada fazendo com que, doravante, as vozes se tornassem sinais que pudessem ser especificados e padronizados. Aqui vai uma curiosidade: a necessidade por criar medidas padronizadas fez com que a atenuação, antes denominada bell pelos engenheiros da empresa de Graham Bell, ganhasse o novo nome de decibel, ou seja, a medida bell fatorada por dez. Esses repetidores “revolucionaram” as telecomunicações (e a Cibernética como um todo) pois permitiram que a mensagem não fosse mais, ela mesma, o seu meio: se antes os sinais sonoros eram apenas atrelados à eletricidade que percorria os cabos, agora esses sinais podiam ser entendidos e manipulados em seus próprios termos, dissociados do meio físico ao qual estavam corporificados.
Agora, rapidamente, vamos tentar entender a imagem abaixo.
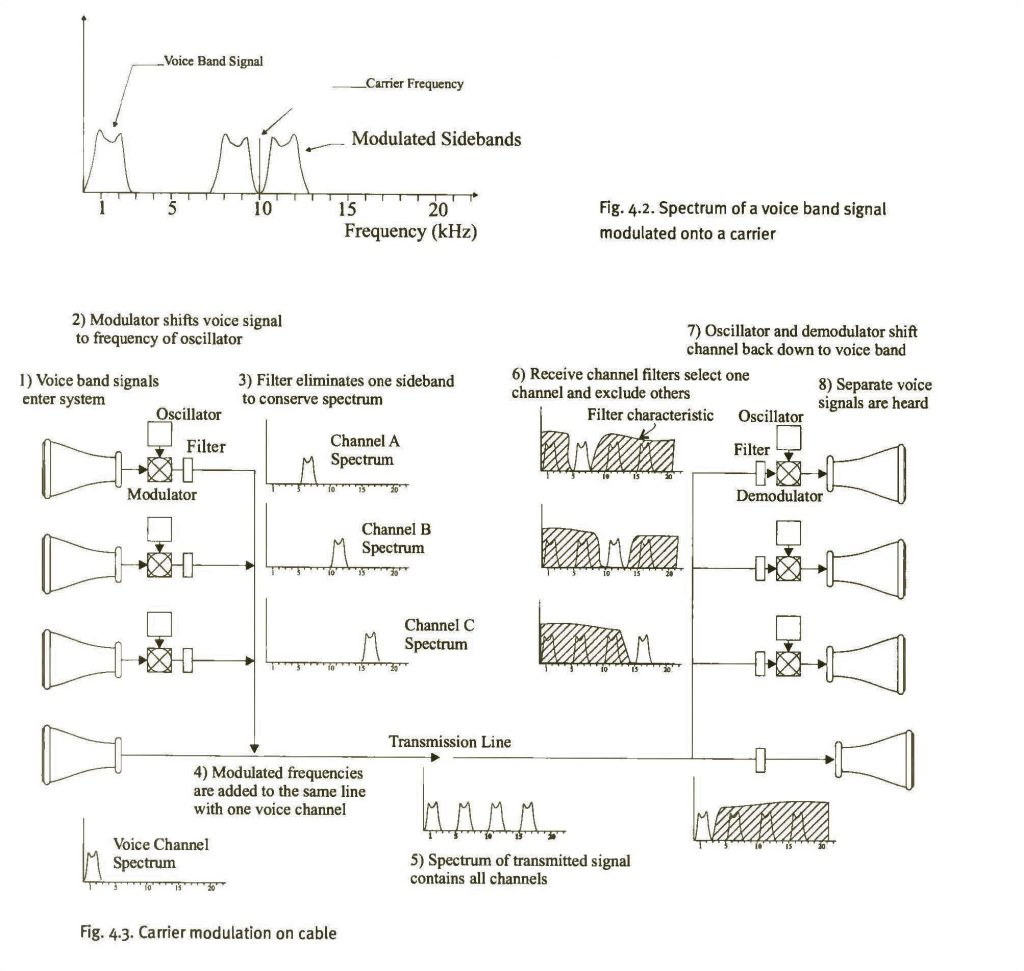
In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 115.
O princípio de funcionamento das telefonia era o seguinte: 1) A pessoa X falava no transmissor de seu telefone, composto por uma peça acústica na qual ficava um microfone de carbono dentro; 2) A fala (tal como no telégrafo) passavam por um oscilador que gerava as ondas sonoras; 3) Essas ondas passavam por um filtro que permitia apenas que uma parte determinada da onda permanecesse (modulação); 4) Essas frequências ondulares de diferentes telefones percorriam o mesmo cabo telefônico; 5) Ao chegar ao receptor, os filtros faziam com que apenas a onda sonora desejava fosse retida, eliminando as demais; 8) O receptor (pessoa Y) ouvia o sinal sonoro.
Esse processo de viagem sonora através dos cabos, contudo, como dito, sofria quando a distância era longa: o sinal ia sendo atenuado devido à resistência física do cobre dos cabos. Os repetidores implantados ao longo dos cabos simplesmente, digamos, repetiam o processo descrito… Os repetidores amplificavam o ganho (gain) dos sinais e, com isso, acabavam causando interferências nas ondas, gerando as famosas “conversas cruzadas” (se, assim como eu, você for jovem há mais tempo, certamente experimentou conversas cruzadas ao falar nos quase extintos telefones públicos).
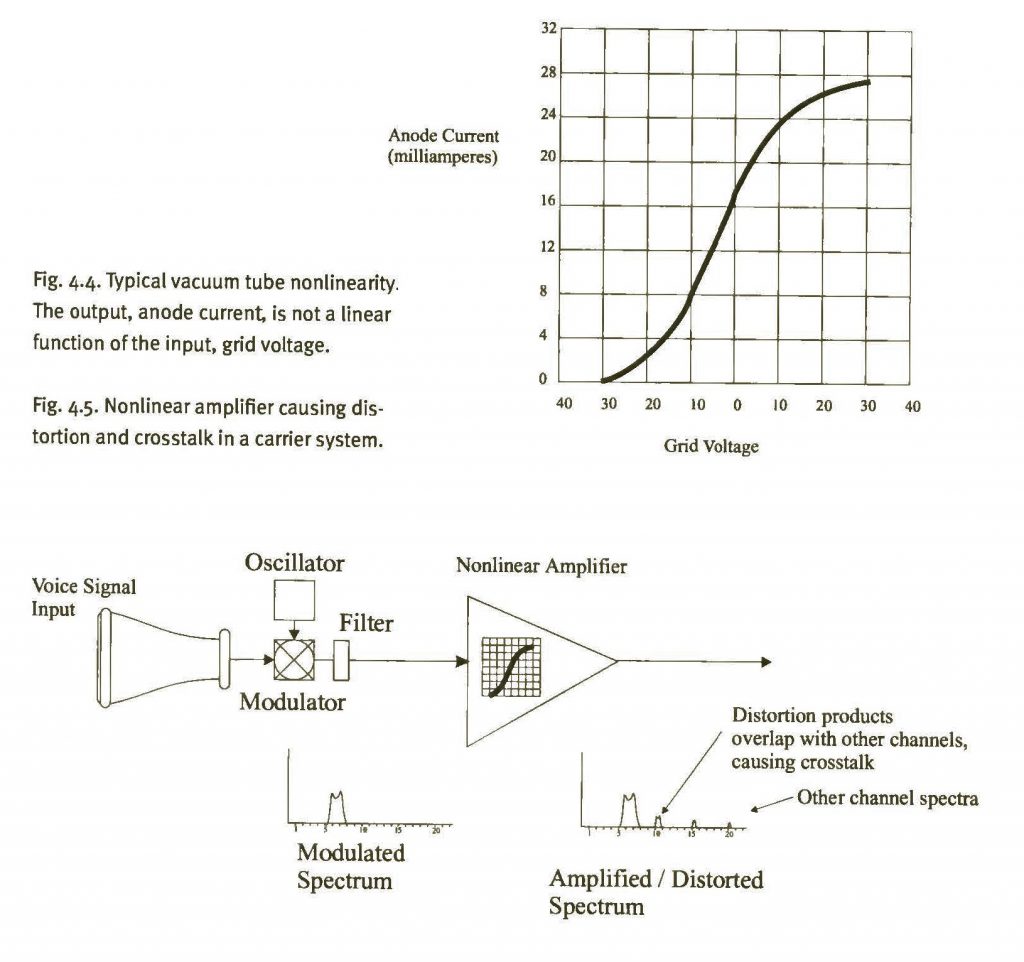
Amplificador não linear. In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 117.
Esse problema de amplificação de sinal com ganho na onda foi o que causou a epifania de Harold Black em 1927. Em seu artigo de 1934, após sete anos atacando o problema nos laboratórios Bell, Black pormenorizou a solução encontrada: estabelecendo-se um circuito na saída do amplificador (após o ganho de sinal) que realimentasse a entrada, faria com que a distorção nas ondas sonoras diminuísse – segundo Black, o seu circuito de feedback fez com que a distorção fosse reduzida por um fator de 100.000 (fazendo com que o ganho também fosse reduzido nessa proporção). A demora na publicação dos resultados foi devida à resistência interna de seus pares dentro do ambiente de trabalho. Foi muito difícil convencer seus colegas (e seu chefe de laboratório) de que o feedback, ao contrário do que se utilizava até então, era negativo, não positivo: ou seja, ao invés de o feedback acrescentar ganhos ao sistema, ele os subtraía (os sinais eram revertidos). Até então, acreditava-se que os feedbacks eram todos positivos, causando regenerações ao sistema (o amplificador recebia as ondas de sinais de volta muitas vezes). Harold Black, assim, foi o responsável por mostrar que o seu feedback negativo era o oposto da regeneração: o ganho era reduzido, não aumentado. Essa retroalimentação levava o sistema à estabilidade, sem distorções. A concepção de Black é utilizada até hoje.
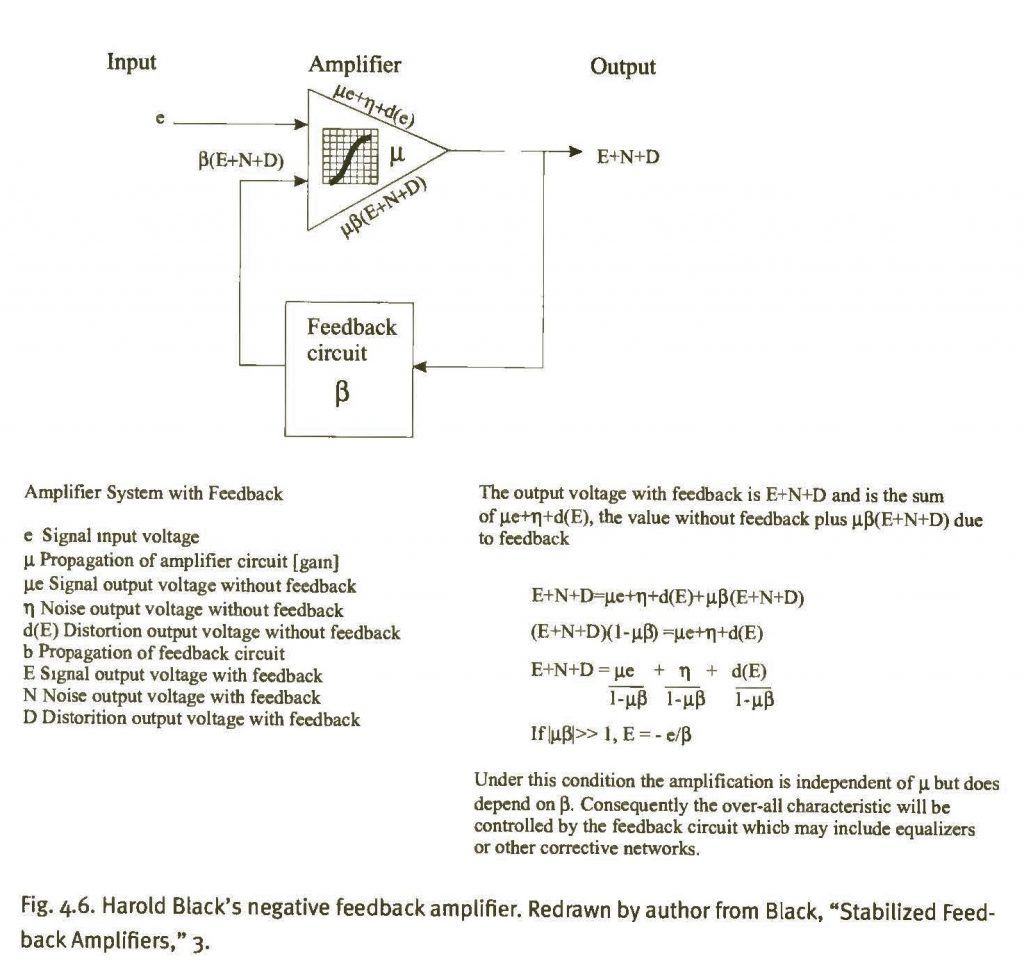
Feedback negativo de Black. In: David A. Mindell, Between human and machine. Feedback, control, and computing before Cybernetics, p. 117.
Sugiro, de verdade, que veja esse vídeo:
</Acréscimo versão 2019>
O feedback está relacionado com a entropia pois, ele mesmo, é o controle da entropia! Felizmente, é um conceito mais fácil de se entender. O seu corpo, com todo o respeito, é uma máquina! Mas de feedback. Se a sua saúde estiver em dia, nenhum sintoma aparecerá em seu corpo, correto? Seus órgãos estão trabalhando direitinho e todo o álcool consumido no fim de semana está sendo eliminado normalmente: em outras palavras, todos os órgãos estão dizendo “OK! Estamos OK!” e, assim, a resposta deles, ou seja, o feedback, diz que tudo está em ordem. Contudo, se você tiver, por exemplo, uma infecção no corpo, seu corpo irá lhe avisar de que algo está muito errado aumentando a temperatura, causando a febre. Para controlar sua temperatura, terá de ingerir medicamentos (ou homeopatia, se quiser continuar doente, claro) que farão os sintomas desaparecerem ao controlarem aquilo que está errado dentro de si: quando a febre sumir, você terá o feedback de que tudo está normal novamente (e não será dessa vez que morrerá e ficará livre dos boletos). Resumindo: o seu corpo tem uma norma de conduta que, ao ser modificada (ie. infecção), gera um feedback (febre) avisando que algo deve ser feito a respeito.
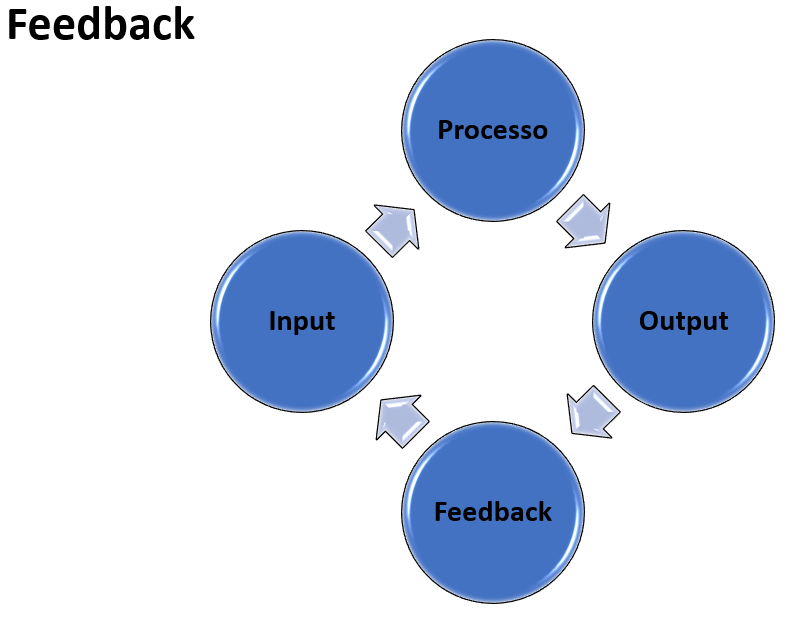
Vamos pensar, agora, em questões computacionais divertidas, ou seja, videogames. Você acabou de comprar aquele jogo que tanto queria e colocou a mídia no aparelho e ligou tudo. O jogo começa, você pega o controle e… nada acontece! Isso não é o normal, não é mesmo? O correto seria você interagir, atuando dentro do jogo, movimentando o seu personagem/avatar. O jogo continua parado, e percebe, então, que está sem pilhas novas no controle. Ao substituí-las, o sistema volta a atuar como pretendido: seus movimentos nas alavancas e botões geram movimentos do personagem na tela do jogo. Você está fornecendo inputs (entradas) a partir dos botões do controle que, ao chegarem no videogame, são processados pelo computador e, depois, têm os outputs (respostas/saídas) transmitidos para a tela da TV/monitor onde você vê seu personagem respondendo a cada comando feito no controle em tempo real. Embora tudo seja quase instantâneo, não deixa de ser um loop (laço) de feedback, como pode ser visto abaixo:
- Ponto Três – Relação entre Homens e Máquinas
Esse ponto não tem todas as conceituações dos pontos anteriores, mas não deixa de ser tão fascinante quanto. Um exemplo desse ponto é dado por Wiener quando fala sobre próteses artificiais em seu livro de 1964, denominado God & Golem, Inc.: a comment on certain points where cybernetics impinges on religion: segundo ele, uma perna de madeira é um substituto mecânico para uma parte de carne e sangue, assim, um homem com uma perna de madeira é um sistema composto de partes humanas e mecânicas. O funcionamento cibernético de uma prótese pode ser explicado da seguinte maneira: suponha que um homem teve a mão cortada próxima ao pulso, mas o coto ainda possui músculos que possam ser contraídos – embora esses músculos não possam mais movimentar sua mão e dedos, eles são capazes de produzir sinais elétricos; eletrodos podem captar esses sinais, amplifica-los, e manda-los para motores elétricos em uma mão artificial; contudo, falta ainda, nesse caso, o laço de feedback: a mão artificial não consegue sentir, não consegue tocar, porém, sinais podem ser enviados do membro artificial ao cérebro do amputado por meio de sensores de pressão colocados nos dedos, por exemplo; com o tempo, o amputado aprenderia a substituir a sensação táctil natural de outrora pela fornecida através dos sensores.
Esse vídeo é bem interessante:
Outro tema fundamental na Cibernética é o da homeostase, ou seja, a capacidade de adaptação de um sistema para que ele se mantenha sempre em equilíbrio. Um pesquisador britânico foi o responsável por demonstrar, na prática, essa conceituação. Em 1948, a primeira “maquina pensante” foi inventada na Inglaterra, no hospital de saúde mental em Barnwood, uma vila perto de Gloucester. O médico Ross Ashby inventou o homeostato, uma máquina inspirada por seu trabalho junto aos pacientes com distúrbios mentais.
Ashby levou 15 anos para fazer o design de seu cérebro eletrônico e mais 2 anos para construí-lo: ao todo, custou £50. Sobre a estrutura e funcionamento do homeostato: tinha quatro interruptores de controle de bombas RAF na base, com quatro caixas de alumínio. As únicas partes móveis eram quatro pequenos imãs, balançando como agulhas em compassos no topo de cada caixa de alumínio. Cada uma das quatro caixas tinha quinze interruptores brutos para mudar vários parâmetros. Embora, à primeira vista, as caixas parecessem desconectadas umas das outras, elas interagiam entre si. Quando a máquina era ligada, os imãs em uma unidade podiam ser movidos pelas correntes elétricas das outras unidades. As movimentações dos imãs, por sua vez, alteravam as correntes, que mudavam as movimentações novamente, e assim por diante. A máquina foi elaborada de modo a manter os quatro imãs eletromagnéticos em uma posição estável, com a agulha sobre cada caixa centralizada no marcador: essa posição era a “normal/confortável” do homeostato. O experimento, contudo, servia para criar “desconforto” na máquina e ver como ela se comportava. Isso podia ser alcançado revertendo a polaridade de uma conexão, mudando algum feedback da máquina, revertendo um imã, restringindo o movimento de um imã em um lado, juntando imãs… A ideia era causar distúrbio no equilíbrio da máquina e ver como ela reagia. Não importava o que Ashby fizesse, logo a máquina encontrava um meio de se adaptar às novas condições, recentrando as agulhas. Ashby acreditava que o homestato resistia a qualquer tentativa de distúrbio.
<Acréscimo versão 2019>
Tomando por base o livro The Cybernetic Brain. Sketches of another future (2010), de Andrew Pickering, vamos tentar entender melhor o diagrama de funcionamento de uma unidade do homeostato ilustrado abaixo presente na obra Design for a Brain, de Ashby, publicada em 1952.

Cada unidade tinha entradas (inputs) independentes umas das outras que eram alimentadas em um conjunto de bobinas (A, B, C, D), gerando, assim, um campo magnético que fazia um imã em forma de barra (M) se movimentar em seu eixo vertical. Ao imã estava anexado uma palheta de metal protegida por um invólucro de acrílico (o topo em cada homeostato; o desenho em forma de arco na parte de cima do diagrama) que captava a voltagem dependendo de sua posição: essa voltagem controlava o tríodo (válvula eletrônica; o círculo sem nome no diagrama) que, por sua vez, controlava as correntes elétricas da saída (output). Cada unidade podia operar de dois modos, de acordo com os interruptores posicionados na frente do dispositivo (letra S, no diagrama): no primeiro modo de configuração, a corrente de entrada (input) chegava à bobina magnética através de um comutador (X), que invertia a polaridade da entrada, e também através de um potenciômetro (P), que aumentava ou diminuía a corrente elétrica de acordo com sua configuração – as configurações do P e do X eram estabelecidas manualmente, usando os botões das fileiras superiores e intermediárias presentes na frente da unidade; no segundo modo, o interruptor S fazia com que a corrente de entrada (input) passasse por um uniseletor/interruptor de passo (letra U, no diagrama) que contava com 25 posições e, ao contrário dos potenciômetros e comutadores, não tinha sua configuração estabelecida manualmente: eram controlados por um comportamento interno do homeostato – quando a corrente elétrica de uma unidade ficava acima do limite pré-estabelecido, o relê (F) fechava, fazendo com que a bobina (G) levasse o uniseletor à próxima posição, de forma randômica.
Ainda seguindo a análise de Pickering, o autor cria uma situação hipotética para ilustrar o funcionamento do homeostato (pp. 104-105). Primeiramente, é necessário frisar que qualquer unidade do homeostato é inerte, não faz nada sozinha. Dito isso, vamos supor que para uma das unidades (podemos chamá-la de homeostato 1) coloquemos o interruptor (S) para se conectar ao uniseletor (U) enquanto os demais homeostatos permanecem com o interruptor configurados manualmente por meio dos comutadores e potenciômetros: em outras palavras, o homeostato 1 tem propriedades variantes enquanto os demais têm propriedades fixas. Quando essa combinação é acionada, o homeostato 1 pode se encontrar em uma das duas condições: 1) condição de equilíbrio estável – significando que a palheta de metal no invólucro de acrílico permanecerá na posição central, demonstrando que não há saída de corrente elétrica; 2) condição instável – significando que a palheta de metal pode atingir os níveis máximos de medição: nesse caso, quando a corrente elétrica cruzasse o limite estabelecido, o relê fecharia, fazendo com que o uniseletor mudasse de posição, obrigando o homeostato 1 a, novamente, buscar uma das duas condições até que, em determinado momento, permanecesse na condição estável e, assim, a palheta de metal repousasse na posição central.
Desse modo, iniciado em qualquer configuração, o homeostato podia reorganizar-se randomicamente até encontrar uma condição de equilíbrio dinâmico com o seu ambiente, sem qualquer intervenção externa.
<Acréscimo versão 2019>
Em 1952, Ashby foi convidado a apresentar o homeostato na Macy Conference em Nova Iorque: na ocasião, estavam presentes Gregory Bateson, Margaret Mead, Warren McCulloch, Julian Bigelow e Arturo Rosenblueth (Norbert Wiener não estava na conferência). Indo na contramão da maioria dos ciberneticistas presentes, Ashby acreditava que não havia distinção entre sistema e ambiente: o homeostato era o organismo e o ambiente ao mesmo tempo, os imãs elétricos eram um distúrbio e um meio de superar o ambiente (isso deixou Bigelow bastante nervoso e gerou discussões). Para Ashby, sua máquina aprendia pois se adaptava a cada situação que se apresentava, tal como se treinam os cães (o comportamento muda de acordo com o aprendizado). Com seu aparelho, Ross Ashby reforçou as ideias em voga de que: 1) os humanos são mecanismos que respondem a seus ambientes tentando manter a homeostase; 2) a restrição para se criar máquinas inteligentes reside em formular os problemas de modo correto; e 3) um conceito de informação que privilegia a exatidão sobre o significado serve melhor a um modelo de construção do que um conceito de informação impreciso. Para Ashby, a cibernética não era sobre matemática, era sobre comportamento, sendo essencialmente funcional e behaviorista.
Se você tiver tido uma formação prévia em Arqueologia, tenho certeza de que chegou até esse ponto pensando: ” Mmmm… Parece que já vi algumas coisas assim…”. Com toda razão! A Cibernética não ficou restrita ao mundo das Exatas (e Biológicas): ela também influenciou demais as Humanidades, principalmente as Ciências Sociais, nas décadas de 1950 e 1960. A Teoria Geral de Sistemas (T.G.S.) elaborada pelo biólogo austríaco Ludwig von Bertalanffy em meados do século XX teve impacto na cibernética e, consequentemente, nas áreas impactadas pela cibernética (dentre elas, a Arqueologia). Resumidamente, para Bertalanffy, um sistema é um conjunto de partes interagentes e interdependentes que, juntas, formam um todo unitário com determinado objetivo e efetuam determinada função em um ambiente. Ou seja: um sistema é formado por elementos independentes que interagem entre si a fim de manter o equilíbrio geral, ou seja, a homeostase. Isso é bastante semelhante ao que foi proposto pela corrente arqueológica do Processualismo, correto?
O artigo de Lewis Binford “Archaeology as Anthropology” (1962) é tido como a pedra angular do Processualismo. Em seu texto, Binford identifica três campos de comportamento que podem ser inferidos a partir dos artefatos e dos contextos em que foram encontrados: ambiental, social e ideológico. Pode-se dizer que o Processualismo (também chamado de Nova Arqueologia) enfatiza a importância de se dar explicação a partir do confronto de hipóteses. Ao contrário do Histórico-Culturalismo, ou arqueologia tradicional, em que semelhanças e diferenças eram explicadas por pessoas compartilhando normas sobre a cultura, a arqueologia processual explica a variação em termos de participação diferencial na cultura (entendida como nosso principal meio de adaptação). O objetivo da arqueologia processual é buscar as razões de por quê ocorrer a variação adaptativa. Para tanto, o processualismo procura leis gerais no comportamento e nos fenômenos da vida social (proximidade com a Antropologia); os padrões comuns podem ser inferidos a partir dos artefatos, que, por sua vez, são classificados de acordo com suas funções, podendo ser tecnômicos (tecnologia, ambiente); sociotécnicos (organização social); ou ideotécnicos (idéias, valores, crenças). Outra característica importante dessa corrente é a teoria de médio alcance, baseada no experimento e na observação de pessoas e animais fazendo coisas no mundo moderno que podem nos auxiliar a entender como padrões são criados. Também faz parte dessa teoria a utilização da Arqueologia Experimental (fabricação de artefatos no presente) para a compreensão da tecnologia do passado. O objetivo da teoria de Binford é compreender transformações evolutivas. O foco central do processualismo não é chegar aos indivíduos, mas ao sistema que há entre o indivíduo e o artefato. O indivíduo é impotente para mudar o sistema (natural ou social). A mudança cultural não ocorre por meio da difusão ou da migração (como dita o Histórico-Culturalismo), mas em termos de processo, sendo os dados arqueológicos particularmente úteis ao estudo das mudanças ocorridas na longa duração.

Diagrama de Sistema Sociocultural. In: David L. Clarke, Analytical Archaeology, 1968.
Se tudo ficou (mais ou menos) claro até aqui, você deve ter percebido que essa área de pesquisa sobre comunicação e controle denominada Cibernética lida com conceituações da física e da biologia para formular uma proposta sobre o que é a informação, e como ela se difunde (por sistemas, nesse caso). Norbert Wiener foi o grande expoente da Cibernética nas décadas de 1940 e 1950, e ainda vamos conversar sobre ele neste curso.
Leitura recomendada
Dessa vez não vou recomendar excertos, pois os temas são bem complexos e caberá a você olhar tudo e selecionar aquilo que lhe interessa. Se, dentre todos, eu puder sugerir uma leitura completa, fique com Cibernética e sociedade: o uso humano de seres humanos, do Norbert Wiener (é o livro escrito para aqueles que, como eu, são das Humanidades).
› WIENER, Norbert. Cybernetics: or control and communication in the animal and the machine. Cambridge, Massachusetts: The MIT Press, 2nd ed., 1985.
› WIENER, Norbert. Cibernética e sociedade: o uso humano de seres humanos. Tradução: José Paulo Paes. São Paulo: Cultrix, 1968.
› WIENER, Norbert. God & Golem, Inc.: a comment on certain points where cybernetics impinges on religion. Cambridge, Massachusetts: The MIT Press, 1964.
› ASHBY, W. Ross. An introduction to Cybernetics. London: Chapman & Hall LTD, 1957.
› ASHBY, W. Ross. Design for a Brain. The origin of adaptative behaviour. London: Chapman & Hall LTD, 1960.
› BINFORD, Lewis. “Archaeology as Anthropology”. In: American Antiquity, vol. 28, n. 2, 1962, pp. 217-225.
› BERTALANFFY, Ludwig von. Teoria geral dos sistemas. Fundamentos, desenvolvimento e aplicações. Tradução: Francisco M. Guimarães. Petrópolis: Editora Vozes, 2010.
› SONI, Jimmy & GOODMAN, Rob. A mind at play: how Claude Shannon invented the Information Age. New York: Simon & Schuster, 2017.
(OK, esse é excerto. Faz parte de uma excelente biografia de Claude Shannon. É um capítulo sobre a base da Informação!)
› PICKERING, Andrew. The cybernetic brain: sketches of another future. Chicago: University of Chicago Press, 2011.
(Mais um excerto – que poderia ser um livro… O capítulo de Pickering sobre Ashby é muito informativo!)
Jogo recomendado
Existem vários exemplos de jogos que lidam com controle de sistemas para adaptação. CivCity: Rome (2006) é um deles e você pode gastar várias horas administrando uma cidade romana.
Filme recomendado
Essa palestra de um dos maiores ciberneticistas, Stafford Beer, é bem elucidativa. Infelizmente, não possui legendas.
Aula 3 (Teoria) – “Domo arigato, Mr. Roboto” – máquinas feitas à imagem dos homens
Antes de prosseguirmos, uma música para relaxar:
Chegamos à era da automação. Ela foi liderada pela Cibernética, e muitos pesquisadores pioneiros estiveram envolvidos na construção de máquinas automatizadas/autônomas.
Os robôs como os conhecemos surgiram na década de 1940/1950, mas a ideia de uma máquina autônoma era bem anterior, sendo que o uso da palavra “robô” remonta à década de 1920, na antiga Tchecoslováquia. A origem da palavra robô (robot) vem da peça de teatro do autor tcheco Karel Tchápek denominada R.U.R, abreviação de Rossumovi univerzální roboti (Robôs Universais de Rossum). A peça, de 1920, conta a história de uma fábrica que faz trabalhadores artificiais denominados roboti (uma junção das palavras tchecas robota – que significa “trabalho obrigatório” – e robotnik – que significa “servo”): eles se revoltam contra seus criadores e terminam destruindo a humanidade. Os robôs na peça não são simples amontoados de metal – são feitos de matéria orgânica e de aço.
Para quem tiver interesse na peça de teatro, achei no YouTube uma versão italiana com legendas em inglês muito legal:
O que é, afinal, um robô?
Vou utilizar aqui a definição da roboticista sérvia Maja Matarić em seu livro Introdução à robótica (São Paulo: Editora Unesp/Blucher, 2014): “Um robô é um sistema autônomo que existe no mundo físico, pode sentir o seu ambiente e pode agir sobre ele para alcançar alguns objetivos” (p. 19). A autora, didaticamente, desmembra essa definição para pormenorizar as conceituações (pp. 19-21).
- Um robô é um sistema autônomo porque “atua com base em suas próprias decisões e não é controlado por um ser humano” (se o fosse, seria teleoperado);
- Um robô é um sistema autônomo que existe no mundo físico porque pertence ao “mesmo mundo no qual existem pessoas, animais, objetos, árvores, o clima e muitas outras coisas” (a robótica lida com as leis da física do mundo; robôs que existem nos computadores são simulações);
- Um robô é um sistema autônomo que existe no mundo físico e pode sentir o seu ambiente porque “tem sensores, ou seja, possui alguns meios de perceber (por exemplo, ouvir, tocar, ver, cheirar) e obter informações do mundo. (…) Um robô verdadeiro pode sentir seu mundo somente por meio de sensores, assim como as pessoas e outros animais o fazem por intermédio dos sentidos”;
- Um robô é um sistema autônomo que existe no mundo físico e pode sentir o seu ambiente e pode agir sobre ele pois “tomar medidas para responder às informações sensoriais e para alcançar o que se deseja é uma condição necessária para ser um robô. Uma máquina que não age (ou seja, não se move, não afeta o mundo, mudando alguma coisa) não é um robô”;
- Um robô é um sistema autônomo que existe no mundo físico e pode sentir o seu ambiente e pode agir sobre ele para alcançar alguns objetivos porque “esperamos que um robô real tenha um ou mais objetivos e se comporte de forma a atingi-los”.
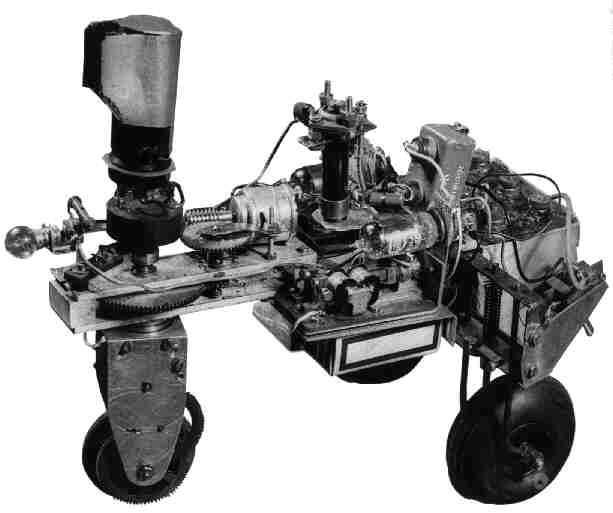
Embora tenha publicado seu livro em 2007, os pontos levantados por Matarić sempre fizeram parte daquilo que se entende por “robô” quando o assunto é cibernética. Em 1949/1950, Norbert Wiener desenvolveu o robô Palomilla: um triciclo com duas rodas grandes atrás e uma pequena na frente montadas em uma base retangular de metal. Nos dois cantos frontais, o robô tinha duas fotocélulas representando olhos: o output das fotocélulas era amplificado e alimentado em uma calha que controlava a pequena roda frontal. Desse modo, Palomilla se movia sempre em direção à luz (ou ao contrário, se a voltagem das fotocélulas fosse revertida). Palomilla foi desenvolvida para simular duas doenças neurais: Parkinson e tremores (lembrando que a cibernética sempre esteve intimamente ligada à biologia, também).



<Acréscimo versão 2019>
É importante ressaltar que, ao contrário da Cibernética estadunidense propagada por Wiener, a versão britânica dos estudos cibernéticos não era focada em aparatos militares, nem realizada com auxílio de grandes verbas: essencialmente, a Cibernética britânica era amadora e centrada no entendimento do cérebro humano como máquina (Pickering, 2010).
Um dos ciberneticistas britânicos mais famosos desse período foi o neurofisiologista Grey Walter (1910-1977). Durante sua trajetória como pesquisador, Walter percorreu três campos principais de problemas: 1) estudo individual dos componentes do cérebro (ou seja, um enfoque reducionista); 2) uso de EEG (eletroencefalograma) para entender as ondas de sinais cerebrais derivadas de estímulos; 3) construção de modelos de cérebros. O terceiro campo foi o que levou Walter à robótica.
Walter dizia que suas tartarugas robôs pertenciam a uma nova espécie inorgânica, a Machina speculatrix (máquina especuladora, em português). As duas primeiras tartarugas, nomeadas Elsie e Elmer, foram construídas em sua casa nos tempos livres entre a Páscoa de 1948 e o Natal de 1949. As tartarugas possuíam duas rodas traseiras e uma dianteira, que era alimentava por uma bateria a fim de movimentar o conjunto para frente, enquanto outro motor era o responsável por fazer o conjunto da “cabeça” rotacionar em seu eixo: ao ir de encontro a um obstáculo, um interruptor de contato no corpo fazia com que a máquina recuasse e, assim, voltasse a ficar livre. A “cabeça” da tartaruga possuía uma célula fotoelétrica que, ao captar uma fonte de iluminação, cortava a energia do motor de sua rotação, fazendo com que o conjunto caminhasse para a frente, em direção à luz. Quando a fonte de luz cessava, a tartaruga voltava ao seu modo de “busca” normalmente. Quando a bateria começava a ficar fraca (por falta de luz na fotocélula), a tartaruga buscava uma fonte de iluminação para se recarregar sozinha.
Tartaruga sem a carapaça. In: Jakob Fredslund, Simplicity applied in projects involving embodied, autonomous robots, 2002, p.8.
Qual a relação da tartaruga, então, com o objeto de pesquisa dos primeiros ciberneticistas britânicos: o cérebro? Para Grey Walter, a tartaruga era um organismo vivo, com órgãos motores, sensores e, também, cérebro, que, nesse caso, era constituído por um simples circuíto formado por uma válvula eletrônica, um capacitor e um conjunto de relês (que eram acionados ou desligados de acordo com os diferentes comportamentos da tartaruga). Assim, a tartaruga, quando relacionada com a ciência do cérebro, podia ser entendida como uma forma de comportamento adaptável: ao explorar o seu entorno, reage a ele, assim como todos os organismos o fazem – isso sugeria, então, que o cérebro orgânico podia conter estruturas semelhantes à tartaruga. Walter denominou a rotação da fotocélula em 360º buscando luz como escaneamento, e afirmou que o cérebro também possuía essa capacidade, pois constantemente escaneava, utilizando os sensores de entrada do corpo humano, objetos de interesse, padrões no mundo e também configurações inerentes ao ser.
</Acréscimo versão 2019>
Um pouco antes de Wiener, o neurofisiologista britânico William Grey Walter (1910-1977) construiu uma série de máquinas inteligentes conhecidas por “tartarugas”. Duas das mais famosas tartarugas receberam os nomes de Elmer e Elsie, baseados nos acrônimos de ELectro MEchanical Robots (robôs eletromecânicos) e Light Sensitive (sensíveis à luz). Essas tartarugas eram robôs simples, construídos com três rodas em forma de triciclo, usando a roda dianteira para direção e as duas rodas traseiras para condução; também contavam com uma célula fotoelétrica (ie. sensor) para detectar níveis de luminosidade, um sensor de colisão (acionado quando a “carapaça” esbarrava em outros objetos espalhados pelo ambiente), uma bateria recarregável (que lhe garantia autonomia), três motores para movimentação das rodas, e um circuito eletrônico analógico com dois tubos de vácuo (Matarić 2014: pp. 28-29). Com todos esses elementos, os seguintes comportamentos eram esperados das tartarugas: procurar a luz e ir em direção a ela (ou evitá-la), desviar de obstáculos no ambiente, e recarregar a bateria. Podemos ver a simpática invenção de Grey Walter nos vídeos abaixo:
A automação nunca deixou de ser uma questão delicada entre os ciberneticistas e a população em geral. Para Wiener, a automação era o equivalente do trabalho escravo e devia aceitar a condição econômica do trabalho escravo. Também dizia que a automação iria produzir uma situação de desemprego comparável à da Depressão (e, em 1962, o presidente John F. Kennedy foi perguntado por um jornalista sobre o impacto dos computadores e da automação nos empregos; o presidente respondeu que o maior desafio nos anos 60 seria achar emprego para os trabalhadores substituídos pela automação: a resposta era mais baseada em medo do que em fatos…). Norbert Wiener também refletiu sobre os impactos da automação/cibernética na religião e elencou três pontos de conflito entre homens, máquinas e Deus em seu livro God and Golem, Inc.:
1) As máquinas podiam aprender – as máquinas mostravam que a Bíblia podia estar errada, pois as criações conseguiam suplantar os criadores (por exemplo, no jogo de damas ou xadrez): poderes mecânicos, segundo Wiener, mostravam os limites do poder divino;
2) As máquinas podiam se auto reproduzir – havia o tabu de que apenas Deus pode criar vida. As máquinas mostraram que elas eram capazes, de fato, de fazer outras máquinas a sua semelhança;
3) As máquinas podiam trazer à tona magia e lenda – Wiener não via a máquina como mágica: ele via a mágica como mecânica. Para ilustrar a mecânica da mágica, Wiener usou o poema de Goethe de 1797 O Aprendiz de Feiticeiro. Para Wiener, a história seguia um padrão que era refletido em inúmeras fábulas, contos de terror e textos religiosos: o homem ambicioso invoca a ajuda da mágica apenas para descobrir que perdeu o controle sobre sua criação.
Para encerrar o tópico sobre automação/robôs na cibernética, uma curiosidade. Durante os anos 1960, dois termos se tornaram famosos: 1) cybernation – referindo-se à automação computadorizada na indústria; 2) cyberculture – criado pela matemática Alice Mary Hilton em 1963, para dizer que a automação não era simplesmente uma segunda revolução industrial: para ela, a automação traria à humanidade a liberdade de tarefas para poder se tornar livre para pensar (se o cultivo, ou seja, a agricultura, trouxe energia para criar a civilização, a automação, ou seja, a cibercultura, teria efeito parecido, com a vantagem de libertar os humanos da necessidade de cultivar os próprios alimentos).
Leitura recomendada
› WIENER, Norbert. God & Golem, Inc.: a comment on certain points where cybernetics impinges on religion. Cambridge, Massachusetts: The MIT Press, 1964.
Já foi recomendado na aula anterior, mas vale a releitura pelos aspectos do confronte homem/máquina vs Deus.
› ČAPEK, Karel . RUR. 1920.
Se quiser ler a obra que deu origem à palavra “robô’, fique à vontade.
› WALTER, W. Grey. “An imitation of life”. In: Scientific American, 182(5), 1950, pp. 42-45.
Artigo de Grey Walter sobre suas simpáticas “tartarugas”.
› PICKERING, Andrew. The cybernetic brain: sketches of another future. Chicago: University of Chicago Press, 2011.
Capítulo que detalha o trabalho de Grey Walter.
Jogo recomendado
Já sonhou em controlar o seu próprio robô em uma simulação? Com Xemo: Robot Simulation (2016) você pode!
Clique aqui para acessar a página de download gratuito: Acessar.
Filme recomendado
Vejam a série da Netflix Love Death + Robots. É muito, muito boa!
Aula 4 (Teoria) – Talos, Maschinenmensch, Major Motoko Kusanagi, Rick Deckard e Borgs – o desenvolvimento do ciborguismo, ou “homens feitos à imagem das máquinas”
Vamos começar com um dos meus filmes preferidos de todos os tempos: Metrópolis (Metropolis, dir. Fritz Lang, 1927)!
Androides (robôs) e ciborgues acabam por se confundir, às vezes. Nem sempre é clara a divisão entre ambos. Geralmente, é tido que os robôs não possuem propriedades orgânicas (ao contrário dos ciborgues). Aproveitando a aula anterior, vamos utilizar aquela definição de robô neste curso, ou seja, máquinas sem suporte orgânico humano. Isso, não impede, contudo, que os robôs sejam feitos à imagem dos homens! Muitos robôs possuem braços e pernas e, principalmente, são utilizados para substituir-nos em algumas de nossas tarefas, como podemos deduzir no filme Blade Runner (dir. Ridley Scott, 1982):
Um dos primeiros autômatos registrados pertence à mitologia grega. Em sua obra Biblioteca, Apolodoro descreve brevemente um autômato de bronze chamado Talos que atuava como guardião em Creta (Livro I, capítulo 9, seção 26):
“Colocando o mar a partir daí, eles [os argonautas de Jasão] foram impedidos de tocar em Creta por Talos. Alguns dizem que ele era um homem da raça de Bronze; outros, que ele foi dado a Minos por Hefesto; ele era um homem de bronze, mas alguns dizem que ele era um touro. Ele tinha uma única veia que se estendia de seu pescoço aos tornozelos, e uma cavilha de bronze ao final da veia. Este Talos manteve a guarda, rondando a ilha três vezes todos os dias; por isso, quando viu o Argo de pé na costa, ele o atacou, como de costume, com pedras. Sua morte foi provocada pelas artimanhas de Medéia, talvez o drogando, ou, como outros dizem, prometendo torná-lo imortal e depois arrancando-lhe a cavilha da veia, de modo que todo o ichor jorrou e ele morreu. Mas alguns dizem que Poias o matou atirando em seu tornozelo”.

 com a imagem de Talos. In: https://en.wikipedia.org/wiki/Talos#/media/File:Didrachm_Phaistos_obverse_CdM.jpg")
Abaixo, um trecho do excelente filme Jasão e o Velo de Ouro (Jason and the Argonauts), de 1963, com animação em stop motion do mestre Ray Harryhausen.
<Acréscimo versão 2019>
A figura de Talos na mitologia grega fornece uma boa discussão sobre o seguinte tópico: ele era um robô ou não? Segundo a historiadora Adrienne Mayor em seu livro Gods and Robots: Myths, Machines, and Ancient Dreams of Technology (2018), Talos ainda gera discussão entre os especialistas. É quase senso comum os robôs serem vistos como seres feitos, não nascidos (made, not born), ou seja, não são naturais pois foram criados por alguém ao invés de terem sido dados à luz por meio de gestação: os deuses do Olimpo, por exemplo, eram nascidos, não feitos (born, not made), aproximando-se, então dos mortais que habitavam a Terra.
Como podemos notar no trecho acima de Apolodoro, Talos foi feito por Hefesto e, por isso, se enquadraria no quesito de autômato puro, pois, como vimos na aula passada sobre Robótica, os robôs precisam se enquadrar nos quesitos de independência (ou seja, movimentar-se livres de cabos e fios) e usam sensores para interagir dentro de um mundo físico. Talos era assim também: ele possuía meios de se locomover sozinho, seus sensores (olhos) viam os inimigos que se aproximavam de Creta e, assim sendo, agia no ambiente para barrar a passagem deles. Talos é um robô, correto?
Mmmm… continuando no texto de Apolodoro, a coisa complica quando chegamos na parte da veia que atravessa todo o seu corpo e está repleta de icor. Os gregos antigos acreditavam que o sangue dos deuses – e também dos mortais – era um fluido que auxiliava na vida, denominado icor. Talos tinha icor em sua veia e, por isso, a estratégia dos argonautas foi a de sangrá-lo até a morte cortando a veia em seu tornozelo. Podemos apontar duas coisas interessantes aqui: 1) o fato de icor correr pela veia de Talos o difere de uma matéria inanimada: ele não é puramente um autômato vazio, é algo mais; 2) o corte realizado na veia na altura do tornozelo de Talos demonstra uma prática que os gregos faziam na Medicina: sangrias (inclusive, sabiam muito bem que, se deixar sangrar demais a veia do tornozelo, a pessoa morreria). É interessante notar que a abertura no tornozelo de Talos seria o equivalente do orifício de respiro de uma peça de bronze produzida por meio da técnica da cera perdida: tal como o bronze escorre por esse duto, o icor de Talos se esvai. Talos, então, é uma peça de bronze no sentido técnico, mas imbuído de vida.
Desse modo, Talos se assemelha aos humanos. E ele também emula os humanos: o modo de Talos enfrentar seus inimigos era abraçá-los e forçá-los contra o seu corpo de bronze que, para se defender, aquecia-se graças ao icor presente dentro dele, queimando os desafetos. Assim, Talos, na mitologia grega, poderia ser visto como uma amálgama entre homem e máquina/autômato/ser mecânico. Na concepção atual, Talos poderia, também, ser visto como um ciborgue.
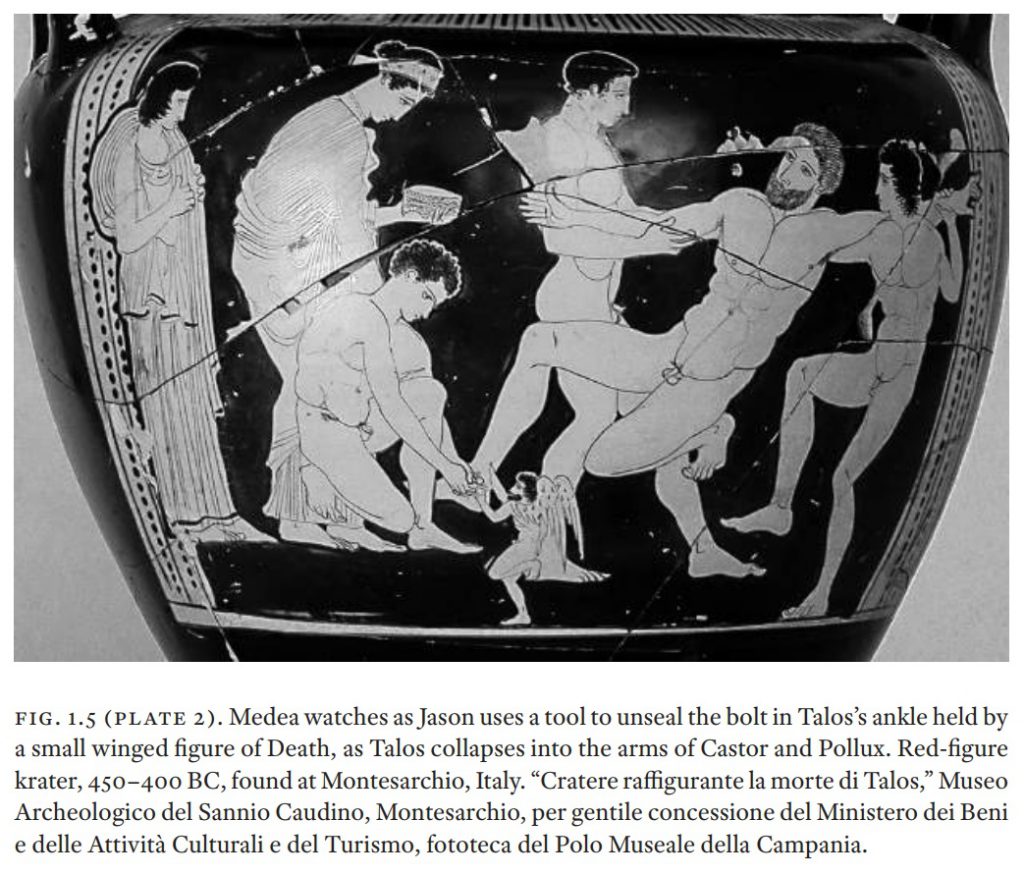
Morte de Talos. In: Adrienne Mayor, Gods and Robots: Myths, Machines, and Ancient Dreams of Technology, 2018.
</Acréscimo versão 2019>
No século XVIII, os autômatos fizeram parte não só do imaginário humano, mas, também, foram postos em prática. Principalmente através das mãos habilidosas do inventor francês Jacques de Vaucanson:
Nessa aula, iremos um pouco além. Vamos falar da junção, de fato, dos homens com as máquinas. Iremos conversar sobre ciborgues!
Embora as discussões sobre o tema tenham surgido ainda na década de 1940, foi nos anos 1960 que a ideia de máquinas e organismos interagindo em novas formas ganhou fôlego. As máquinas podiam ser vistas de duas formas:
1) ciborgues (cybernetic organism, organismo cibernético) – máquina como parte dos organismos biológicos existentes, ou seja, a modificação maquinária podia ajudar um animal (e homens) a sobreviver e a operar em ambientes hostis, tais como espaço sideral e profundezas de oceanos;
2) máquinas vivas sem base orgânica – máquinas sem tecidos com características de seres vivos, ou seja, com habilidade para reprodução, mutação, evolução, e pensamento.
Algumas das questões sobre máquinas como seres vivos foram discutidas entre Wiener e John von Neumann na década de 1940, enquanto Neumann trabalhava no ENIAC (Eletronic Numerical Integrator and Calculator) dentro da Universidade da Pensilvânia. Por volta de 1946, Neumann sentiu que o cérebro humano era simplesmente muito complexo para ser estudado como um modelo para computadores: ele sugeriu que era necessário estudar seres mais simples, como os vírus. Em uma série de palestras intitulada Theory of Self-Reproducing Automata (publicadas em 1966), Neumann deliberadamente pulou de uma descrição das máquinas em termos orgânicos para uma descrição de seres vivos em termos mecânicos. Porém, para ele, a reprodução, de um ponto de vista mecânico, levava a uma conclusão oposta: auto reprodução orgânica era evolutiva; auto reprodução mecânica era degenerativa: uma máquina elaborada para fazer outras máquinas deve conter seus próprios componentes, o design da nova máquina, e as partes e ferramentas para montar a nova máquina, ou seja, a máquina “pai” era construída para ser mais complexa do que a máquina “filho”. Segundo Neumann, para uma máquina poder construir outra de mesma complexidade, ela teria de ter as seguintes partes: órgão estimulante, órgão de fusão (para soldar as partes), órgão de cortes (para dessoldar partes), e um músculo para produzir movimentação.
J. C. R. Licklider, cientista da computação estadunidense e um dos pioneiros da internet, via os problemas de comando e controle como essencialmente problemas de interação homem-computador. Licklider não queria delegar cada vez mais decisões autoritárias às máquinas: para ele, homem e máquina não estavam em competição – eles complementavam um ao outro, gerando uma simbiose homem-máquina (ideia articulada no artigo Man-Computer Symbiosis, de 1960), tornando humanos e computadores estreitamente ligados. Contudo, três problemas tinham de ser resolvidos para a simbiose acontecer:
1) compartilhamento de tempo – divisão de recursos de processamento de supercomputadores caros entre um número de usuários humanos;
2) aperfeiçoamento das limitações das interfaces input-output dos computadores;
3) velocidade de armazenamento e acesso a grandes quantidades de dados e informações – para Licklider, interfaces gráficas e reconhecimento de voz seriam altamente desejáveis.
Em 1962, Licklider começou a trabalhar na Pentagon’s Advanced Research Projects Agency (ARPA), continuando seu trabalho de aperfeiçoamento da comunicação homem-máquina: para ele, a única solução era uma rede de computadores interligados (algo que só foi realizado quase 20 anos após, com a internet).
O primeiro ciborgue, contudo, nasceu em maio de 1960, no Texas, no hospital da Randolph Air Force Base como um desafio para voar em novas altitudes. O doutor Nathan Kline e o engenheiro Manfred Clynes publicaram um artigo intitulado Drugs, Space and Cybernetics: Evolution to Cyborgs nesse ano sobre a teoria do controle automático de sistemas ao corpo humano (ciborgue). A ideia básica do ciborgue era intuitiva: na Terra, a maioria das funções regulatórias do corpo funcionam (não temos de lembrar de ajustar nossa pressão sanguínea ou como respirar) – o objetivo, então, era emular esse comportamento automático e inconsciente no espaço sideral, liberando, assim, o astronauta das limitações do corpo humano. Para tanto, podiam ser implantados organismos artificiais no corpo humano para regular os inputs, e drogas podiam ser injetadas para auxiliar na regulagem. As ideias, contudo, não deixaram o papel, mesmo com a NASA (fundada em 1958) levando em consideração tais estudos.
O ciborgue, contudo, não possuía usos apenas no espaço. Na Terra, os militares também começaram a pesquisar o assunto. Ralph Mosher, engenheiro da General Electric, conseguiu milhões de dólares em financiamentos para a junção homem-máquina trabalhando para as Forças Armadas estadunidenses. Para Mosher, faltava algo relevante na relação com as máquinas: o feedback. Ele entendeu que o sentido cinestésico das forças dos ossos e músculos importava – isso gerava uma máquina cibernética antropomorfa (cybernetic anthropomorphus machine, CAM). Mosher chamou sua primeira CAM de Handyman: formada por um par de poderosos braços mecânicos, ligeiramente maiores do que os humanos, mas com estrutura similar (juntas de cotovelos e garras de dois dedos), que podiam efetuar 10 movimentos em um espaço tridimensional – essas ferramentas ficavam em uma caixa preta na frente do aparato e eram alimentadas por cabos hidráulicos. As garras hidráulicas imitavam as ações dos braços e mãos de um homem, e ele, em contrapartida, sentia o feedback das garras por meio de sensores. Com a Guerra do Vietnã, Mosher pôde trabalhar junto ao exército na construção de CAMs para caminharem nos ambientes hostis das selvas. Em 1964, o Pedipulator (ver vídeo abaixo) foi construído: a máquina bípede parecia um AT-ST do filme Star Wars – uma cabine com uma grande janela frontal sustentada sobre duas pernas finas com quase 6 metros de altura. Para Mosher, os mecanismos cibernéticos tinham grande vantagem sobre os veículos convencionais: uma integração efetiva homem-máquina eliminava alavancas e pedais de freio, fazia a programação ser obsoleta, requeria pouco treino, seu feedback de força reduzia riscos, e máquinas cibernéticas podiam deixar os operadores livres para focar nos problemas que se apresentassem. Embora impressionasse as Forças Armadas, o Pedipulator gerou a preocupação sobre como ele se colocaria de pé caso caísse no terreno: a solução, então, foi desenvolver uma máquina quadrúpede – porém, ele se mostrou bastante difícil de ser controlado pelos operadores mesmo após treinamento. Somente uma máquina caminhante cibernética foi construída para o exército antes de o programa ser descontinuado. Para Mosher, havia uma diferença sutil entre controle humano e controle automático: uma simples pá usada em jardinagem era uma CAM pois estendia o corpo humano e seus sentidos e podia ser usada sem treinamento, tornando-se parte do corpo do operador (pois, ao contrário de um guindaste, a pá fornecia sentido de força, superfície, posição, velocidade e direção).
Em novembro de 1965, a GE lançou um exoesqueleto completamente funcional para cargas pesadas muito semelhante ao que James Cameron apresentaria no filme Aliens, em 1986. Denominado Hardiman (“man” sendo abreviação de “manipulator”), ele foi construído a fim de lidar com cargas pesadas em situações extremas: carregamento de bombas em asas de aviões de caça, construção subaquática, e trabalho manual em viagens no espaço. O Hardiman, contudo, teve o projeto cancelado em 1968 porque os militares não estavam convencidos de sua viabilidade. Mosher, porém, nessa época já dizia que não era necessário ter um operador dentro da CAM: o aparato podia ser controlado remotamente.

Desse modo, vimos que ciborgues são uma realidade e, se for adepto das ideias de Donna Haraway (A Cyborg Manifest, 1985), você também é um ciborgue: a utilização de ferramentas estende a nossa capacidade de atuação no mundo e, também, utilizamos máquinas cibernéticas em nosso cotidiano, em uma simbiose. É uma visão um pouco diferente daquelas encontradas em filmes ou obras de ficção científica, não é? Por exemplo, os borgs do Star Trek: a Nova Geração não são bem aquilo que foi mostrado aqui:
<Acréscimo versão 2019>
Aposto que bateu curiosidade para saber como são os ciborgues do século XXI, não foi? Esse vídeo do The Guardian é incrível! Recomendo vê-lo inteiro:
</Acréscimo versão 2019>
Leitura recomendada
› RID, Thomas. Rise of the machines. A cybernetic history. New York: W. W. Norton & Company, Inc., 2016.
O capítulo 4, intitulado “Organims”, oferece um panorama sobre o ciborguismo e foi usado de base para essa aula.
› MAYOR, Adrienne. Gods and Robots: Myths, Machines, and Ancient Dreams of Technology, 2018.
A Introdução e o primeiro capítulo são realmente interessantes para se ter uma ideia de como os mitos antigos podem se relacionar com nossas ideias de robôs e ciborgues.
› NEUMANN, Jon von. Theory of self-reproducing automata. Urbana/London: University of Illinois Press, 1966.
A série de palestras de Neumann sobre a reprodução das máquinas. Pesadão.
› CLYNES, Manfred E. & KLINE, Nathan S. “Cyborgs and space”. In: Astronautics, september, 1960.
O famoso artigo sobre a invenção do ciborgue.
› LICKLIDER, J. C. R. “Man-computer symbiosis”. In: IRE Transactions on Human Factors in Electronics (1), 1960 , pp. 4-11.
Artigo curto e excelente de Licklider sobre a simbiose homem-máquina. Fundamental.
› KLINE, Ronald. “Where are the cyborgs in cybernetics?”. In: Social Studies in Science (39), 2009 , pp. 331-362.
Esse não é o Kline do artigo clássico de 1960. Nesse texto, há um apanhado da história do ciborguismo e seus estudos atuais.
Jogo recomendado
Jogos com ciborgues são muitos. Um dos mais divertidos, porém, é o Far Cry 3: Blood Dragon, lançado pela Ubisoft em 2013. Você é um soldado com implantes que precisa destruir tudo pelo caminho (o clima de anos 80 é memorável!). Um dos melhores jogos que já experienciei.
Você pode adquirir na Steam: Acesse.
Filme recomendado
Ghost in the Shell (1995) é a adaptação do mangá de Shirow Masamune. Nem vou falar mais nada.
Aula 5 (Teoria) – LSD ou Realidade Virtual? Drogas e virtualização do espaço afetando a consciência humana – um panorama
<Acréscimo versão 2019>
Antes de começarmos, um poema escrito por Richard Brautigan, em 1967, dentro do contexto da Contracultura estadunidense, sobre a relação entre Cibernética e Natureza.
Todos assistidos por máquinas de adorável graça
Eu gosto de imaginar (e
quanto antes melhor!)
uma campina cibernética
onde mamíferos e computadores
vivem juntos em harmonia
mutuamente programada
como água pura
tocando o céu claro.
Eu gosto de imaginar
(agora, por favor!)
uma floresta cibernética
cheia de pinheiros e eletrônicos
onde cervos perambulam em tranquilidade
passando por computadores
como se eles fossem flores
em desabrochar giratório.
Eu gosto de imaginar
(e tem que existir!)
uma ecologia cibernética
onde estamos todos livres dos nossos trabalhos
e unidos novamente à natureza,
retornados aos mamíferos
nossos irmãos e irmãs
todos assistidos
por máquinas de adorável graça.
(In: Rafael Evangelista. Para além das máquinas de adorável graça: cultura hacker, cibernética e democracia. São Paulo: Edições Sesc, 2018)
</Acréscimo versão 2019>
Não demorou muito para a Cibernética adentrar outros campos que não fossem os acadêmicos. Isso acabou refletido em três vertentes principais de exploração de ideias: 1) a cibernética de “auto-ajuda”; 2) a cibernética da contracultura estadunidense; e 3) a cibernética de ficção científica.
O que eu denomino de “cibernética de auto-ajuda” é aquela que criou algo inspirado nas ideias de Wiener e que ganhou adesão de milhares de pessoas, mas que não necessariamente manteve-se fiel aos princípios da cibernética. Podemos citar, por exemplo, o caso do cirurgião plástico Maxwell Maltz que, em 1960, publicou o livro Psycho-Cybernetics – um dos mais vendidos livros sobre “cibernética” até os dias de hoje. Basicamente, o que Maltz propôs foi a “força do pensamento positivo”: se você tem um objetivo, coloque-o em seus pensamentos e atue para que ele se realize (ou seja, adapte-se ao objetivo). Em outras palavras, tudo o que qualquer pessoa faz na vida, mas com roupagem nova e “científica” (baseada superficialmente na cibernética) para vender um método. Abaixo, um vídeo explicativo…
Uma década antes de Maltz, o escritor de ficção científica L. Ron Hubbard fundou aquilo que chamou de Cientologia. Seu livro Dianética, de 1950, tornou-se a base para os cientologistas e apregoa que muitas doenças são psicossomáticas e podem ser curadas com uma readaptação da mente. A Cientologia é centro de debates desde sua fundação, e muitos de seus ex-membros acusam que sofreram lavagem cerebral e até mesmo cárcere privado. Não estou aqui para perder o meu (e o seu) tempo com explicações aprofundadas de pseudo-ciências. Sugiro que assista ao documentário Going Clear: Scientology & the Prison of Belief (2015) se deseja mais informações.
Passado esse momento tenebroso, vamos falar da influência da contracultura estadunidense.
Por volta de 1970, a cibernética como ciência das Exatas estava enfraquecida e cedendo lugar aos demais usos, como na psicologia e sociologia. Seu resgate, contudo, veio por meio do movimento da contracultura californiana, principalmente com os trabalhos do editor, escritor e futurista Stewart Brand. Brand fundou a revista Whole Earth Catalog, lançando o primeiro número em 1968, contendo as resenhas de seis livros sobre cibernética redigidas por ele. Para Brand, o catálogo em si era uma ferramenta cibernética pois trabalhava com comunicação e feedback: a cada número lançado, os leitores respondiam com cartas e o catálogo ia se modificando de acordo com os pedidos das pessoas, gerando, então, um laço de feedback negativo. Em 1984, Stewart Brand decidiu colocar o Whole Earth Catalog online, para ficar em contato com a comunidade hippie. Brand escolheu como nome para o conteúdo online Whole Earth ‘Lectronic Link (WELL), indo ao ar no dia 1 de abril de 1985. O número de usuários do WELL era cerca de seis mil pessoas por volta de 1992, tornando-se, provavelmente, a primeira rede social online com apelo público, com uma comunidade interagindo massivamente entre si.
No contexto do movimento cultural estadunidense, em 1972, o antropólogo Gregory Bateson publicou Steps to an Ecology of Mind, livro que influenciaria a cibernética no ponto de vista da consciência. Para Bateson, a mente reside no sistema todo; ele ilustrou isso com o exemplo do lenhador: munido com um machado, o lenhador acerta a árvore repetidamente, modificando a inclinação do ângulo da lâmina e a força necessária de acordo com o trabalho em execução – desse modo, a árvore é parte do processo, não é algo externo a ele (isso se adequava à cibernética pois o processo mental de autocorreção acontece graças ao sistema todo: árvore-olhos-cérebro-músculo-machado-golpe-árvore). Para Bateson, se o machado era uma extensão do homem, também o era a árvore, pois o homem não poderia usar o machado sem a existência da árvore: assim, a mente está no sistema todo – homem mais ambiente. Ao ter contato com Ross Ashby em uma Macy Conference, Bateson entendeu a sociedade como um homeostato, e também que um computador (ou máquina) não pode ser um “processo mental”, pois o computador pertence a um circuito maior que inclui um homem e um ambiente do qual a informação é recebida. O circuito também era uma noção importante para Bateson, pois o enxergava como uma conexão circular ou movimento: circuito era algo maior que um simples loop de informação – ele implicava conexão de fios e sistemas entre várias partes, o circuito era a ponte entre o loop de feedback e a rede, e era esse sistema ampliado que mostrava características mentais.
Já no campo da ficção científica, podemos dizer que a cibernética influenciou e foi influenciada ao mesmo tempo. Algumas obras ajudaram a definir uma “visão do futuro” que de um “empurrão” nas pesquisas acadêmicas sobre o tema (talvez o maior exemplo seja a série Star Trek). Dentre as obras literárias de ficção científica, podemos destacar duas que tiveram grande impacto (e têm até hoje). Em 1981, o escritor (e professor em Ciências da Computação e Matemática na San Diego State University) Vernor Vinge lançou seu livro True Names, sendo creditado como o primeiro autor a articular a futurista visão de mundos paralelos gerados por computadores como novos domínios de interação humana. O livro conta uma história de um grupo de hackers que vivem uma vida dupla: uma no “mundo real” e outra no “Outro Plano”, um mundo virtual dentro de computadores, processadores e interruptores. A visão de Vinge não diferia daquela proferida pelos engenheiros das Forças Aéreas estadunidenses da época: homem e máquina estavam profundamente interligados. True Names articulou um dos temas mais dominantes do cyberpunk: a fuga em redes de computadores.
Em 1984, William Gibson publicou Neuromancer, um dos marcos do cyberpunk e responsável pela criação do termo ciberespaço: um espaço virtual de interação de usuários. Gibson romantizou a tecnologia: quando criou a linguagem e a estética do ciberpunk, ele sequer sabia que Hard Drives tinham discos giratórios – até 1985, Gibson não tinha tido um computador pessoal (ele comprou um Apple II, caso queira saber). Sugiro dar uma olhada no vídeo abaixo se quiser saber mais sobre o movimento ciberpunk:
<Acréscimo versão 2019>
Ainda sobre William Gibson, cabe aqui uma menção ao filme Johnny Mnemonic, de 1995, baseado no conto homônimo de Gibson escrito em 1981. Nele, vemos a questão da imersão no ciberespaço, com a conexão direta entre o cérebro humano e a virtualidade. O filme não é muito bom, confesso, mas fica a dica (coloquei para iniciar em uma parte que mostra a conectividade homem-máquina):
</Acréscimo versão 2019>
Contudo, a Força Aérea estadunidense já voava e combatia no ciberespaço antes mesmo de Gibson cunhar o termo. A invenção do “espaço virtual” se deu no começo da década de 1970, no contexto da Guerra do Vietnã. O cockpit dos caças, especialmente os F-15, era abarrotado de informações, com inúmeros botões e interruptores, além de mostradores minúsculos: era muito difícil o piloto dar conta de tudo voando à velocidade do som. Para solucionar esse problema, os engenheiros viram que era necessário fazer as interfaces das máquinas mais parecidas com os humanos, ao invés de requisitar que os humanos fossem mais parecidos com as máquinas. O responsável por essa mudança foi o tenente e engenheiro formado na Duke University Thomas Furness. Em 1976, Furness e sua equipe de laboratório apresentaram o projeto do VCASS (Visually Coupled Airbourne Systems Simulator): após pesquisas e desenvolvimento, apresentaram o protótipo em 1981, chamando-o de “super cockpit”. O capacete, segundo alguns pilotos que o testaram, era parecido com o utilizado por Darth Vader no filme Star Wars (1977). Custando cerca de $40 milhões em desenvolvimento, o capacete tinha um display em alta resolução, com alta iluminação para mostrar imagens ao piloto independentemente da direção em que ele olhasse ou das condições climáticas fora do cockpit. O capacete fornecia uma visão estereoscópica, com um display para cada olho, e ângulo de visão de 120 por 60 graus: ele também tinha um espelho prateado para fornecer holografia filtrando a luz ambiente, fones de ouvidos 3D no formato das orelhas dos pilotos para emular o som tridimensionalmente, e rastreamento de movimentação de mãos e feedback háptico (sensores pneumáticos eram postos nas luvas para o piloto sentir que estava puxando uma alavanca, por exemplo). Uma vez que vestisse o capacete, o piloto estava apto a interagir com a aeronave em quatro modos diferentes: 1) virando a cabeça para olhar para um alvo, fazendo com que a aeronave mirasse automaticamente; controlando ações por voz (por exemplo, dizendo “Select”, “Lock on”, “Zoom”); 3) tocando um painel sensível para interagir com interruptores virtuais; 4) movimentando as luvas que possuíam um rastreador magnético que orientava a posição das mãos. O capacete foi um sucesso e continuou a ser aperfeiçoado, incluindo uma versão denominada Agile Eye, de 1987, que contou com a ajuda dos designers do filme Star Wars.



Aqui, uma entrevista muito interessante com o Thomas Furness, um dos pioneiros da Realidade Virtual:
<Acréscimo versão 2019>
O conceito de ciberespaço, ainda hoje, é bastante fluido. Embora ele tenha surgido dentro de ambientes de Realidade Virtual (como acabamos de ver acima), logo a sua ideia se estendeu ao que conhecemos por Internet atualmente: ela, por sinal, é praticamente sinônimo de ciberespaço. Acredito que caibam aqui algumas definições ipsis litteris de alguns pensadores que se debruçaram (e se debruçam) sobre o ciberespaço.
A primeira é de William Gibson, em sua obra Neuromancer, de 1984. Embora não tenha sido o primeiro uso do termo ciberespaço, é tido como o mais impactante. Aqui vai a sua definição (tradução da versão da Editora Aleph, 2008):
Ciberespaço. Uma alucinação consensual vivenciada diariamente por bilhões de operadores autorizados, em todas as nações, por crianças que estão aprendendo conceitos matemáticos… uma representação gráfica de dados abstraídos dos bancos de todos os computadores do sistema humano. Uma complexidade impensável. Linhas de luz alinhadas no não espaço da mente, aglomerados e constelações de dados. Como luzes da cidade, se afastando…
Nos dias 4 e 5 de maio, em Austin, Texas, o professor de Arquitetura da Universidade do Texas Michael Benedikt promoveu a primeira conferência sobre ciberespaço conhecida. Dois anos depois, a conferência foi editada em formato de livro e, ainda hoje, é uma referência na área. Vou deixar, então, a definição de Benedikt aqui por extenso (1992, pp. 122-123):
O ciberespaço é uma realidade globalmente conectada em rede, sustentada por computador, acessada e gerada por computador, multidimensional, artificial ou “virtual”. Nesta realidade, para a qual todo computador é uma janela, os objetos vistos ou ouvidos não são representações físicas nem, necessariamente, representações de objetos físicos, mas são, antes, na forma, caráter e ação, compostos de dados, de pura informação. Essas informações derivam em parte das operações do mundo físico e natural, mas, na maioria das vezes, derivam do imenso tráfego de informações que constituem empreendimentos humanos em ciência, arte, negócios e cultura.
As dimensões, eixos e coordenadas do ciberespaço não são, portanto, necessariamente as do nosso ambiente natural e gravitacional com as quais estamos familiarizados: embora espelhem nossas expectativas de espaços e lugares naturais, elas têm dimensões impressas com valor informativo apropriado para orientação e navegação ideais nos dados acessados.
No ciberespaço, as instituições e empresas com uso intensivo de informações têm forma, identidade e realidade funcional – em uma palavra, uma arquitetura – que é equivalente e diferente da forma, identidade e realidade funcional que possuem no mundo físico. A realidade física comum dessas instituições, empresas, etc., é vista como fenômeno de superfície, como casca, sua verdadeira energia fluindo em arquiteturas invisíveis, exceto no ciberespaço.
O mesmo acontece com os indivíduos. Egos e múltiplos egos, papéis e funções têm uma nova existência no ciberespaço. Aqui, nenhum indivíduo é apreciado apenas pela virtude, se houver, de sua aparência, localização ou circunstâncias físicas. Novas associações líquidas e múltiplas entre pessoas são possíveis, por razões econômicas e não econômicas, e novos modos e níveis de comunicação verdadeiramente interpessoal surgem.
O ciberespaço tem uma geografia, uma física, uma natureza e uma regra do direito humano. No ciberespaço, o homem comum e o funcionário de informações podem pesquisar, manipular, criar ou controlar informações diretamente; ele pode ser entretido ou treinado, buscar solidão ou companhia, ganhar ou perder poder… de fato, pode “viver” ou “morrer” como quiser.
Por fim, deixo a definição proposta pelo filósofo Pierre Lévy (a quem retornaremos na próxima aula). Segundo ele (tradução da obra Cibercultura, Editora 34, 1999, p. 17):
O termo [ciberespaço] especifica não apenas a infraestrutura material da comunicação digital, mas também o universo oceânico de informação que ela abriga, assim como os seres humanos que navegam e alimentam esse universo. Quanto ao neologismo ‘cibercultura’, especifica aqui o conjunto de técnicas (materiais e intelectuais), de práticas, de atitudes, de modos de pensamento e de valores que se desenvolvem juntamente com o crescimento do ciberespaço.
Sobre a infraestrutura material mencionada por Lévy, ele a divide, em seu livro Cibercultura, em:
1) Tratamento – do ponto de vista físico do equipamento, a informática reúne técnicas que permitem digitalizar a informação (entrada), armazená-la (memória), trata-la automaticamente, transportá-la e colocá-la à disposição de um usuário final, humano ou mecânico (saída). Os processadores dos computadores são chips que realizam cálculos aritméticos e lógicos sobre os dados inseridos. Eles realizam essas operações em grande velocidade devido ao número de transistores dentro deles, sendo que essa velocidade tende a aumentar exponencialmente a cada dezoito meses, segundo a lei de Gordon-Moore, uma vez que se dobra a densidade de transistores dentro dos microprocessadores;
2) Memória – os suportes de gravação e leitura de informações são geralmente chamados de “memória. No início, a informação digital era armazenada em cartões perfurados, depois passou a ser armazenada em fitas magnéticas, discos magnéticos, discos óticos, circuitos eletrônicos etc. A tendência, desde o início, é que as memórias evoluam para armazenar o máximo possível de dados em um espaço físico cada vez menor, com seus custos diminuindo constantemente;
3) Transmissão – a transmissão de informações digitais pode ser feita por diversas vias de comunicação. Apesar de ser possível transportar fisicamente os suportes de armazenamento (por exemplo, usar aviões para transportar discos rígidos), a conexão em rede on-line (“em linha”) é a mais rápida. A informação, nesse caso, usa a rede telefônica para ser modulada (codificada analogicamente de forma adequada) ao entrar na rede telefônica e desmodulada (redigitalizada) quando chegar a um computador na outra ponta do cabo: o aparelho que permite essa modulação e desmodulação da informação digital chama-se “modem”. As informações podem viajar por meio de cabos coaxiais de cobre, por fibras óticas ou por vias hertzianas (ondas eletromagnéticas);
4) Interfaces – todos os aparatos materiais que permitem a interação entre o universo da informação digital e o mundo ordinário. Lévy destaca duas linhas de pesquisa relevantes para as interfaces: a) realidade virtual – usada nos domínios militar, industrial, médico e urbanístico por meio de interação humana sensório-motora com modelos digitais; b) realidade ampliada (ou realidade aumentada) – em que nosso ambiente físico é permeado por modelos digitais com os quais podemos interagir de várias formas e modos. A diversificação e a simplificação das interfaces, combinadas com os progressos da digitalização, convergem para uma extensão e uma multiplicação dos pontos de entrada no ciberespaço;
5) Programação – um programa (software) é uma lista organizada de instruções codificadas destinadas a fazer com que um ou mais processadores do computador executem uma tarefa. Esses programas são escritos com o auxílio de linguagens de programação: códigos especializados para escrever as instruções a serem processadas. Existem linguagens de programação muito próximas da estrutura material do computador (linguagens de máquina, assemblers), e linguagens de programação “avançadas”, mais próximas do inglês (por exemplo: Pascal, C, Java etc.). Hoje em dia também existem linguagens de programação que não necessitam a redação de códigos, permitindo ao usuário programar por meio de blocos lógicos visuais;
6) Programas – permitem ao computador prestar serviços específicos a seus usuários (por exemplo: programas que calculam automaticamente o pagamento de empregados, que gerenciam estoques, ou que comandam máquinas em tempo real). Os sistemas operacionais, por sua vez, são programas que gerenciam os recursos dos computadores (memória, entrada e saída etc.) e organizam a mediação entre o hardware e o software aplicativo. Se nem todos os dados são programas, podemos dizer que todos os programas são dados: eles devem ser acessados, arquivados e lidos pelos computadores.
</Acréscimo versão 2019>
Falar sobre a criação de dispositivos de Realidade Virtual, é falar de Jaron Lanier. Lanier trabalhou como programador na Atari, criando o jogo Moondust, o primeiro jogo musical para videogames. Antes mesmo de perder o emprego com a crise da Atari de 1983, Lanier trabalhava em uma linguagem de programação visual que denominou Mandala: em setembro de 1984, a revista Scientific American dedicou um número inteiro ao software de Lanier, que abrira uma empresa de nominada VPL Research (Visual Programming Language Research). Logo, Lanier descobriu que programar visualmente utilizando mouse e teclado era um fator limitante para a sua linguagem: para contornar isso, queria utilizar luvas de dados (data gloves). Em 1985, Lanier contratou Thomas Zimmerman, também ex-funcionário da Atari, que em 1982 havia começado a desenvolver uma data glove devido ao seu desejo de tocar air guitar ao mesmo tempo em que produzisse sons. A luva era feita em Lycra com sensores ópticos de fibra de vidro: quando o usuário flexionava um dedo ou virasse o pulso, as fibras eram curvadas, transmitindo menos luz – o computador media a perda de luz e traduzia esses valores em comandos; outro sensor localizava a posição da mão em um espaço tridimensional: o computador coletava os dados, desenhando uma imagem de uma mão se movimentando na tela; fios que saíam da luva iam para um computador high-end da época: um Macintosh IIx com 128 MB de RAM e um processador de 16-MHz. A companhia de Lanier vendeu 1.3 milhões de luvas para a Mattel como um dispositivo de jogos e substituto de joysticks, e um número menor de versões mais desenvolvidas e caras para a IBM e a NASA. Além da luva, a empresa de Lanier desenvolveu o HMD chamado Eye Phone, que era um tanto desajeitado para o uso. Deixemos Lanier apresentar seus produtos:
E aqui, um vídeo sobre o uso de data gloves em videogames (contém linguagem inapropriada para menores de idade):
A invenção de dispositivos de Realidade Virtual abalaram positivamente o psicólogo e neurocientista Timothy Leary. Leary (que era conhecido de Stewart Brand, e encontrou também Lanier) foi um dos responsáveis pela propagação da Realidade Virtual. Estudioso das drogas, Leary dava palestras em universidades sobre a consciência surgida quando se usava LSD. Em uma de suas falas, Leary chegou a dizer que estava migrando do uso de LSD para o uso da Realidade Virtual, afirmando que computadores podiam alterar o estado de consciência do usuário. Para Leary, o computador é um cérebro: ele não pode simplesmente ser comparado a um computador, ele não funciona como um computador, ele, por si só, é um computador; e, por ser um computador, o cérebro podia ser conectado por meio de computadores. Essa palestra, embora não tenha a melhor qualidade audiovisual, é muito elucidativa:
Falamos bastante sobre espaços virtuais, ciberespaços e Realidade Virtual. Vamos continuar a conversa sobre a virtualização da realidade na próxima aula!
Leitura recomendada
› RID, Thomas. Rise of the machines. A cybernetic history. New York: W. W. Norton & Company, Inc., 2016.
Os capítulos 5 (intitulado “Culture”) e 6 (“Space”), serviram de base para essa aula.
› BENEDIKT, Michael. “Cyberspace: some proposals”. In: BENEDIKT, Michael (ed.). Cyberspace. First steps. Massachusetts/London: The MIT Press, 1992.
Esse (enorme) capítulo apresenta o ciberespaço de um modo que, garanto, você não havia pensado antes.
› Whole Earth Catalog. Fall, 1968.
Primeiro volume do catálogo de Steward Brand.
› LANIER, Jaron & BIOCCA, Frank. “An insider’s view of the future of Virtual Reality”. In: Journal of Communication, vol. 42, n. 4, 1992, pp. 150–172.
Entrevista cedida por Lanier sobre a Realidade Virtual desenvolvida na época.
Jogo recomendado
Que tal um jogo para o DOS sobre a obra literária de Gibson Neuromancer?
Você pode jogar Neuromancer (1989) online: Acesse.
Filme recomendado
Há muitos filmes sobre Realidade Virtual. O mais recente é baseado em um dos livros mais legais sobre RV que já li, Jogador N. 1, escrito por Ernest Cline em 2011, e adaptado ao cinema por Steven Spielberg (2018).
Aula 6 (Teoria) – Realidade Virtual e Realidade Aumentada – conceitos básicos
De todas as aulas deste curso, talvez tenhamos chegado a mais filosófica. A Realidade Virtual (R.V.) e a Realidade Aumentada (R.A.) são frutos diretos da Cibernética pois, como veremos, seus elementos básicos lidam com feedback. Peço a você um pouco de paciência e, principalmente, que abra sua mente, pois iremos discutir o que seria essa tal de “realidade”. Vou me basear bastante em minha tese de Doutorado (caso queira lê-la, está aqui). Vamos lá!
Como quase todos os autores que falam sobre Realidade Virtual, também irei começar expondo a alegoria de Platão. Primeiro, veja o vídeo abaixo (habilite as legendas em português):
A principal ideia por trás do conceito virtual pode ser encontrada na obra A República do filósofo grego Platão, redigida no século IV a.C.. O “Mito da Caverna” de Platão descreve uma caverna separada por um muro alto que, do lado de dentro, tem prisioneiros acorrentados de costas ao muro, enquanto o lado de fora da caverna está aberta ao mundo, com pessoas vivendo normalmente e acendendo fogueiras: uma pequena abertura no muro é o que liga os dois lados; os prisioneiros, nascidos dentro da caverna e, por consequência, sem ter noção do mundo exterior, veem sombras refletidas na parede – são imagens das pessoas do lado de fora que, graças à luz das fogueiras, adentram a caverna pela pequena abertura no topo do muro; junto com as sombras, chega o som dos homens de fora e os prisioneiros, sem terem percepção do que acontece do outro lado do muro, acreditam com convicção de que essas sombras são a realidade; se um dos prisioneiros conseguisse se libertar e escalar o muro, ele iria deparar com uma outra realidade, a do mundo dos homens que acendem as fogueiras na natureza – estaria, então, semeada nesse prisioneiro libertado a dúvida: se voltar para dentro da caverna e contar a seus companheiros corre o risco de, ou ser ignorado, ou até mesmo ser morto devido à acusação de mentira. A alegoria da caverna de Platão talvez seja o que melhor exemplifica a R.V.: a capacidade de fazer com que nós acreditemos em algo que nos chega de modo indireto, criado pelas leis da física ou por programação de computadores. A R.V., então, pode ser definida como algo que possui o potencial de se tornar real (fictício ou verossímil).
Não é tarefa simples definir o que é real. Muitas pessoas podem dizer que real é o que existe, mas, pensando-se assim, por que muitas dessas mesmas pessoas dizem que um arquivo de editor de texto no computador (como o que estou usando nesse exato momento) é algo virtual? O arquivo, de fato, existe, não? Afinal, estou trabalhando nele agora. Se você estiver com meu trabalho em mãos, impresso em papel, ele é mais real do que se o ler na tela do seu computador (ou tablet, ou smartphone)? Se você chegou à conclusão de que tudo, papel ou meio digital, é real, parabéns: você compartilha das mesmas ideias do filósofo francês da informação que tem recebido bastante destaque acadêmico nos últimos anos, o Pierre Lévy – e em quem eu me baseio também para discutir a realidade.
Pierre Lévy tem contribuído enormemente para o campo da comunicação, estudando as relações entre a Internet e a sociedade. Entre suas obras traduzidas para o português, podemos destacar As tecnologias da inteligência: o futuro do pensamento na era da informática, Cibercultura e O que é o virtual? – possuindo esse livro algumas definições importantes para nós nesse instante. Em O que é o virtual?, publicado na França em 1995, Lévy lançou novos olhares sobre as conceituações de real e virtual, apontando ideias que fizeram os estudiosos repensarem suas próprias definições. Não é muito fácil aceitar e assimilar suas concepções em um primeiro momento (tendo em vista que a maioria de nós passou a vida toda opondo real ao virtual), tampouco é simples de explicar. Farei aqui uma brevíssima tentativa de explanar os conceitos de Pierre Lévy, mas seria muito importante os interessados nesse debate lerem a obra original para melhor compreensão. Para fins didáticos, vou separar as três definições principais que norteiam seu pensamento:
1) Real: é aquilo que existe no momento, é o presente. Seguindo o exemplo de Lévy, o real é como uma árvore que enxergamos;
2) Virtual (do latim virtus, “força, potência”): é o potencial de algo vir a ser real, embora o virtual em si seja real. Dentro da semente está uma árvore em potencial, a semente é o virtual da árvore e, como semente, é real também. Uma árvore pode, do mesmo modo, vir a ser uma folha de papel, logo, a árvore também contém o virtual, mesmo sendo real. A virtualização é um questionamento, é uma problemática que deve ser respondida em algum momento;
3) Atual: é o que algo é de fato, é uma espécie de “codificação”. O atual da árvore é ser madeira, seiva, galhos, raízes e folhas. A atualização, então, se opõe não ao real, mas ao virtual, uma vez que fornece respostas às problemáticas geradas pela virtualização. Assim sendo, a virtualidade e atualidade são dois tipos diferentes da realidade.
Em outras palavras: tudo é real! Mas em estágios distintos e que ocorrem ao mesmo tempo (ou não). Retomemos o exemplo do arquivo de texto que estou digitando. Estou vendo e interagindo com o teclado do meu computador para que surjam caracteres na tela: isso é o real. Contudo, esse arquivo de texto não está sendo redigido em um só dia e, por isso, ele fica armazenado em meu computador em forma de bits e bytes: ele é o virtual, pois nele está contido um arquivo de texto em potencial, que pode vir a ser real (quando eu clicar duas vezes para ele abrir) ou não (se eu o mantiver guardado em meu disco rígido, virtualmente). Todo o processo de transformação dos bits e bytes em uma janela de editor de texto que acontece quando clico duas vezes sobre o ícone com o nome do meu arquivo é o atual. E a todo instante o real se atualiza, pois digito caracteres e mais caracteres para formar palavras que surgem na tela LCD.
Você pode assistir ao próprio Lévy falando sobre seus conceitos no vídeo abaixo (ative as legendas):
Agora que discutimos a parte filosófica, vamos falar um pouco sobre a parte prática da Realidade Virtual e Aumentada.
A R.V. teve seus primeiros experimentos na década de 1940, quando no contexto da Segunda Guerra Mundial a força aérea dos EUA passou a construir simuladores de voo para treinar seus pilotos. Um pouco mais de uma década depois, em 1956, Morton Heilig desenvolveu o Sensorama. Inspirado pelo sucesso do Cinerama (cinema + panorama) nos anos 1950 nos EUA, que consistia em três telas de cinema colocadas em série formando uma concavidade de 146°, o Sensorama de Heilig era um simulador multissensorial apresentado em forma de cabine que misturava visão estereoscópica, áudio estéreo, vibrações mecânicas, aromas e vento – contudo, o Sensorama não era interativo.
Durante sua pesquisa de doutorado no Massachusetts Institute of Technology (MIT) em 1963, o cientista da computação Ivan Sutherland desenvolveu o dispositivo que é considerado por muitos como um precursor na área da Computação Gráfica, o Sketchpad. Para efeitos de comparação, o Sketchpad funcionava como os tablets de hoje: utilizando uma caneta óptica (light pen), o usuário conseguia desenhar diretamente na tela do computador formas geométricas simples, como linhas retas, círculos e hexágonos. A inovação trazida pelo Sketchpad, tal como descreveu em seu artigo (anexado às leituras recomendadas abaixo), estava na interação homem-máquina dentro de um sistema de comunicação gráfica que deu origem ao CAD (Computer-Aided Design, “desenho auxiliado por computador”). Mas Ivan Sutherland continuou suas pesquisas e foi além, desenvolvendo em 1968 o primeiro dispositivo HMD (Head-Mounted Display, “vídeo-capacete estereoscópico”) de Realidade Virtual e Realidade Aumentada. Veja o Sketchpad em ação:
Aqui, o HMD de Suterland:
O dispositivo criado por Sutherland, então, trabalhou com uma característica essencial da R.V., que é a imersão. Com o capacete colocado, o usuário tem a sensação de estar imerso em outro ambiente que se mostra verossímil. O grau de imersão varia de acordo com o dispositivo utilizado: mesmo com o uso de óculos 3D, a nossa sensação de imersão é ligeiramente inferior à proporcionada por um HMD, que preenche toda a nossa visão. É diferente estar diante de um monitor de computador 3D ou com um capacete ou óculos de RV – o nosso grau de visão é bem maior do que os monitores, permitindo-nos observar o que está ao seu redor, prejudicando o efeito tridimensional; o mesmo acontece em uma CAVE (Cave Automatic Virtual Environment, “caverna”), quando nossa sensação de imersão sofre uma quebra devido às arestas que unem as telas da caverna e atrapalham a paralaxe. Abaixo, a CAVE presente na Universidade de São Paulo (USP) denominada Caverna Digital:
Afora a imersão, a R.V. também conta com a interação em seu cerne. Isso é o que difere basicamente a animação da R.V.: a interatividade. Enquanto na animação o usuário é passivo, apenas observando o que é mostrado na tela, na R.V. ele é o protagonista principal, atualizando a todo momento a realidade mostrada na tela ou HMD. A interação do usuário no ambiente acontece, na maioria dos casos, em seis graus de liberdade (6DOF – six degrees of freedom), ou seja, seis tipos de movimentação: para frente/para trás, acima/abaixo, esquerda/direita, inclinação para cima/para baixo, angulação à esquerda/à direita e rotação à esquerda/à direita; porém, também existem dispositivos que permitem 3DOF e 2DOF (como o mouse comum de computador).
Os sensores na R.V. são responsáveis por permitir a imersão/interação dos usuários e consistem em dispositivos de hardware que atuam em conjunto com softwares. Esses dispositivos são separados em duas grandes categorias: os dispositivos de entrada e os de saída, responsáveis por realizar o tracking do usuário (o rastreamento de sua posição no ambiente virtual). No vídeo abaixo você pode conferir a liberdade de movimentação do usuário utilizando os dispositivos de interação rastreados:
Além da R.V., outra área que vem se desenvolvendo com fôlego enorme é a da Realidade Aumentada (R.A.). Segundo Allan B. Craig (2013: 15), a R.A. é “um meio no qual informação é adicionada ao mundo físico sendo registrada nesse mundo”. Já o cientista da computação Ronald T. Azuma, em seu artigo seminal A Survey of Augmented Reality, de 1997, define a área como:
“uma variação de Ambientes Virtuais (A.V.), ou Realidade Virtual, como é mais comumente chamado. As tecnologias de A.V. imergem completamente o usuário em um ambiente sintético. Enquanto imerso, o usuário não pode ver o mundo real ao seu redor. Em contraste, a R.A. permite ao usuário ver o mundo real, com objetos virtuais sobrepostos ou compostos com o mundo real. Portanto, a R.A. suplementa a realidade ao invés de substituí-la completamente. Idealmente, pareceria ao usuário que os objetos reais e virtuais coexistem no mesmo espaço, semelhantemente aos efeitos alcançados no filme Uma Cilada para Roger Rabbit. (…) A R.A. pode ser pensada como um ‘meio termo’ entre A.V. (completamente sintético) e telepresença (completamente real).”
Azuma aponta, ainda, três características básicas da R.A.: 1) combina real e virtual; 2) interação em tempo real; 3) registrada em 3D. Allan Craig, por sua vez, se debruça sobre essas três características e as amplia, chegando aos seguintes aspectos-chave (2013: 16):
1) o mundo físico é aumentado pela informação digital sobreposta em uma visão no mundo físico;
2) a informação é mostrada juntamente com o mundo físico;
3) a informação mostrada é dependente da locação do mundo real e da perspectiva física da pessoa no mundo físico;
4) a experiência da realidade aumentada é interativa, isto é, uma pessoa pode perceber a informação e fazer mudanças nessa informação caso deseje: o grau de interatividade pode ir desde uma simples mudança de perspectiva física (por exemplo, enxergar em um diferente ponto de vista) até manipular ou até mesmo criar nova informação.
A partir do que foi dito acima, podemos dizer que a R.A. permite que uma camada de informação (digital, sempre) seja posta sobre o mundo físico que observamos. Imagine a seguinte situação: por alguma razão que só você sabe, numa certa noite decide pegar seu carro para comprar algo no mercado mais próximo. Tudo seria tranquilo se você não tivesse escolhido visitar alguma cidade que mais parece ter saído de algum livro do Stephen King – ou seja, só há gente estranha, pouca iluminação e, para variar, o mapa que você comprou no posto de gasolina mais próximo (que ficou a mais de 50 quilômetros para trás) está desatualizado há anos. Seria uma tragédia se você não tivesse trazido consigo seu smartphone. Graças a esse maravilhoso dispositivo, sua noite está salva (por enquanto, afinal, nunca se sabe…): você seleciona o aplicativo de GPS, busca por “mercado” e, num instante, surge a localização mais próxima. Porém, como dito, você está em um lugar em que as ruas são drasticamente mal iluminadas e totalmente esburacadas: é perigoso dirigir e olhar a tela do dispositivo ao mesmo tempo (já que a saída de áudio está queimada faz tempo). O que fazer? Vivendo em um futuro não muito distante do meu, você sabe que apertando um simples botão toda a informação de seu GPS é transferida para o para-brisa touchscreen de seu carro. Ao fazer isso, imediatamente surge um ponto pulsante no vidro que parece atravessar os prédios. Ao mesmo tempo, sensores implantados nos postos de iluminação defeituosos, por algum milagre, estão funcionando e captam o sinal oriundo de seu carro. Eles decodificam a informação e liberam pequenos feixes de luz que, sobrepostos ao asfalto, vão lhe guiando até o mercado. Parabéns, você chegou ao inóspito mercado gerenciado por algum sujeito mal-encarado graças à Realidade Aumentada (agora pague a conta e suma daí antes que seja tarde demais!).
Por ser a R.A. algo com o qual devemos interagir no mundo físico, não há muitas aplicações que estejam presas aos computadores desktops que conhecemos (ou até mesmo aos notebooks/laptops). A maioria das aplicações de R.A. são desenvolvidas para dispositivos portáteis, como o smarthphone que acabamos de ver, ou tablets: é o que convencionou-se denominar A.R. Mobile (Augmented Reality Mobile, ou Realidade Aumentada Móvel – RAM). Os principais benefícios da RAM incluem: a portabilidade; a mobilidade; estar disponível a qualquer hora e em qualquer lugar o acesso, de forma flexível, a diversos recursos e em tempo real; economia de tempo; rapidez de comunicação; capacitação e envolvimento dos alunos. Contudo, os desenvolvedores sempre precisam ter em mente as limitações reais da RAM, uma vez que ela é um conjunto de software e hardware, dependendo muito deste último para existir. Assim sendo, é necessário considerar o hardware do público alvo: não adianta ter uma aplicação R.A. notável se quase nenhum usuário possuir dispositivos capazes de executá-la. Devemos, então, sempre levar esses fatores em consideração quando formos trabalhar com RAM: tamanho da tela do dispositivo; consumo de energia; a precisão de localização; câmera de qualidade; processamento e memória; registro; segurança; tempo real; dependência; desempenho; cobertura; quantidade de dados; dinamicidade; interação; conteúdo. O conteúdo é o fator primordial em toda e qualquer aplicação, não devendo, jamais, ser relegado ao segundo plano.
Vamos falar mais um pouco sobre Realidade Virtual na próxima aula. Na verdade, é um dos meus assuntos preferidos: videogames!
Leitura recomendada
› SUTHERLAND, Ivan. “Sketchpad. A man-machine graphical communication system”. In: DAC ’64 Proceedings of the SHARE design automation workshop. New York: ACM, 1964, pp. 329-346.
Artigo clássico de Sutherland.
› AZUMA, Ronald T. “A Survey of Augmented Reality”. In: Presence: Teleoperators and Virtual Environments 6, 4 (August 1997), 1997, pp. 355-385.
Artigo de Azuma com o estado-da-arte da Realidade Aumentada até a época em que foi redigido.
› CRAIG, Allan B. Understanding augmented reality. Concepts and applications. San Francisco: Morgan Kaufmann Publishers, 2013.
Livro obrigatório para o entendimento sobre Realidade Aumentada.
› SHERMAN, William R. & CRAIG, Alan B. Understanding virtual reality. Interface, application, and design. San Francisco: Morgan Kaufmann Publishers, 2003.
Provavelmente o livro mais completo sobre Realidade Virtual.
Jogo recomendado
Bom, acredito que todo mundo já deva ter experimentado Pokémon Go (2016) mas, caso você não tenha, aproveite: é um grande exemplo de Realidade Aumentada aplicada a dispositivos móveis.
Pode baixar a versão para Android ou iOS.
Filme recomendado
O Passageiro do Futuro (The Lawnmower Man, 1992) é um dos primeiros filmes a retratar a Realidade Virtual imersiva nos cinemas. É muito interessante!
Aula 7 (Teoria) – Jogos eletrônicos – interatividade aliada à História e Arqueologia
O conteúdo apresentado em sala de aula difere do conteúdo apresentado aqui. Na sala de aula, tivemos as palestras proferidas pela Profa. Amanda Daltro de Viveiros Pina, Doutoranda em Arqueologia no Museu de Arqueologia e Etnologia da USP, e pela bacharela em Antropologia (habilitada em Arqueologia) Lilian Cordeiro Lima Marques, da UFMG.
<Curso versão 2018>
O conteúdo apresentado em sala de aula difere do conteúdo apresentado aqui. Na sala de aula, tivemos a palestra proferida pelo Prof. Vinicius Marino, Doutorando em História Econômica na Faculdade de Filosofia, Letras, e Ciências Humanas da USP.
</Curso versão 2018>
Optei por deixar nessa seção, contudo, recortes de minha tese e projeto de pós-Doutorado focados nas Humanidades Digitais e jogos eletrônicos como meios de aprendizado histórico.
É difícil para um humanista definir conceitos pois eles fluem através do tempo. O centro do estudo humanista é buscar origens e interpretar como nós usamos a Linguagem, seja textual, artefatual, visual, musical ou arquitetural, para entender o mundo que os humanos criaram. Muitos humanistas tendem a ver as Humanidades Digitais como uma metodologia que traz as ferramentas e poder computacionais ao trabalho tradicional das Humanidades. Os cientistas da computação, por sua vez, tendem a ver as Humanidades Digitais como o estudo sobre a influência da forma eletrônica nas disciplinas em que é usada, e o que essas disciplinas têm para contribuir ao nosso conhecimento sobre computação. Contudo, antes de adentrarmos o campo das Humanidades Digitais propriamente ditas, é necessário estabelecer o seu contexto histórico, remontando às Humanidades tradicionais.
As Humanidades têm sua origem datada no século II d.C., com a obra Noites Áticas, do jurista, escritor e gramático romano Aulo Gélio. Em seu trabalho, Aulo Gélio diz que o termo latino humanitas não significava o que a maioria das pessoas pensava na época, ou seja, um sinônimo para a palavra grega φιλανθρωπία (filantropia); para Gélio, humanitas estava ligada ao termo παιδεία (paideia), representando a educação e formação nas artes liberais em voga durante o Império Romano. Segundo Aulo Gélio: “A busca desse tipo de conhecimento, e a formação dada por ele, foram concedidas, dentre todos os animais, ao homem apenas, e por isso são denominadas humanitas, ou ‘humanidade’” (Noites Áticas, XIII.17). Durante a Idade Média, principalmente na França e na Itália, esse sentido de educação nas artes liberais foi retomado, estudando-se as sete artes liberais, divididas em dois grupos de disciplinas: o trivium (com o objetivo de desenvolver a linguagem), englobando a Gramática, a Dialética (contraposição e contradição de ideias que levam a outras ideias), e a Retórica (a arte de usar uma linguagem para comunicar de forma eficaz e persuasiva); e o quadrivium (voltado ao estudo da matéria), abarcando a Aritmética (teoria dos números), a Música (aplicação da teoria dos números), a Geometria (teoria do espaço), e a Astronomia (aplicação da teoria do espaço). A educação (da classe comerciante) italiana nesse período, por exemplo, era fortemente prática, enfatizando a alfabetização vernácula, a matemática voltada aos negócios, a literatura secular (romances e aventuras violentas), a religião popular (biografias de santos e autoajuda espiritual), as habilidades retóricas e gramaticais envolvidas na oratória pública e na criação de legislação, documentos legais e contratos privados.
No fim do século XIII e início do XIV, no Renascimento, contudo, as comunas livres do norte da Itália (especialmente Florença) começaram a enfatizar um novo conjunto de currículo, principalmente sob influência do intelectual, poeta e humanista Francesco Petrarca (1304-1374), que enxergava a excelência na Antiguidade Clássica: foram acrescentadas às sete artes liberais a Filologia (o estudo rigoroso dos documentos escritos antigos e de sua transmissão), o estudo e escrita da Poesia, a História e a Filosofia moral. No século XV, os currículos das universidades europeias começaram a ser conhecidos como studia humanitatis (baseando-se no termo humanitas cunhado por Aulo Gélio, significando o aprendizado e instrução nas artes liberais a fim de se interpretar a evidência das vidas humanas, pensamentos e ações). Os estudantes das studia humanitatis eram conhecidos por humanistas. O termo moderno “Humanismo” (humanismus) só foi cunhado pelo filósofo alemão Friedrich Immanuel Niethammer em 1808 para fazer a distinção entre uma educação baseada puramente em habilidades específicas e a educação baseada nas buscas filosóficas, filológicas e literárias. No fim do século XIX e início do XX, principalmente nos EUA, começou a haver um distanciamento entre a educação universitária e as artes liberais, influenciadas pelo cientificismo do historiador Leopold von Ranke, tornando-se a primeira mais “objetiva”. Desse modo, por volta de 1920, os objetivos da pesquisa em Humanidades começaram a encontrar o rigor da Física e das Ciências Sociais, criando padrões sistemáticos e profissionalização, e afastando o Humanismo acadêmico de outrora do público de agora: começou a haver separação entre poeta e escritor de ficção, ensaísta e dramaturgo, artista visual e arquiteto etc. Esse novo Humanismo passou a ser encontrado em departamentos de História, Literatura, Letras Clássicas e Filosofia.
As Humanidades Digitais (HD), por sua vez, surgiram no contexto da computação digital, que obteve avanços significativos após a criação dos transistores em 1947 nos laboratórios da Bell Telephone, nos EUA. O primeiro trabalho de Humanidades com computação, ou seja, Humanidades Digitais, data de 1949, quando o jesuíta e teólogo italiano Roberto Busa procurou o fundador da IBM, Thomas J. Watson, requisitando ajuda para indexar os trabalhos de Tomás de Aquino. O pedido, contudo, não foi para contabilizar palavras, foi para conseguir “interpretação doutrinal”, ou seja, um trabalho qualitativo. O Index Thomisticus de Roberto Busa foi disponibilizado na Internet em 2005 para a consulta de qualquer pessoa (http://www.corpusthomisticum.org/it/index.age). As Humanidades Digitais atualmente tentam se aproximar do conceito original de Humanidades, usando, dessa vez, habilidades de comunicação modernas a fim de interpretar o que é ser humano e o que é ser um cidadão responsável na Era Digital. Uma busca simples pelo termo “Digital Humanities” em um site de pesquisa acadêmico como o banco de dados IEEE, aponta 87 trabalhos publicados entre os anos 2016 e 2017 sobre Humanidades Digitais . Essa área de pesquisa tem se fortalecido no âmbito acadêmico a cada ano que passa, mostrando que os humanistas estão se tornando mais cônscios do contexto digital em que atuam, e utilizando ferramentas digitais para facilitar a obtenção de dados, a sua análise e, por fim, a sua distribuição/publicação.
O termo “Humanidades Digitais” foi cunhado por John Unsworth (na época, professor de Inglês na Universidade de Virginia) em 2001, quando sugeriu a mudança do título do compêndio que lançaria com outros autores de A Companion to Humanities Computing (como era conhecida até então as HD, sendo muito ligada a uma forma de computação) ou Companion to Digitized Humanities, para A Companion to Digital Humanities, a fim de mudar a ênfase em uma simples digitalização de documentos. As HD, porém, como podemos inferir a partir de websites, blogs, fóruns especializados e até mesmo o Twitter, não possuem uma definição apenas, um cânone já concretamente estabelecido: uma vez que não temos “humanistas do lápis” ou “humanistas das máquinas de escrever”, é necessário perguntar o que o adjetivo “digital’ faz nas “Humanidades Digitais”. O que as HD querem dizer por “Humanidades Digitais” não é o uso de computadores para escrever ou ler textos de Humanidades; é, sim, o uso de dispositivos digitais para fazer observações críticas e teóricas que não são possíveis com as análises tradicionais feitas com lápis ou máquinas de escrever. Assim sendo, computadores permitem novas lentes críticas para entender os objetos de estudo das humanidades tradicionais. Embora alguns pesquisadores possam achar que a melhor forma de descrever as HD seja por um diagrama de Venn interseccionado (as Humanidades são um círculo, o Digital é outro; e as HD são a intersecção dos dois), o pesquisador Alex Reid (Universidade de Buffalo) diz que, ao invés de pensar “o Digital’ e “as Humanidades” como dois círculos separados que sofrem intersecção, devemos pensar em um grande círculo com a etiqueta “Humanidades Digitais”. Ou seja, não há estudos das Humanidades separado do Digital. Estudar as Humanidades necessita de uma compreensão de que o mundo agora é digital. Não existe Humanismo separado do digital: devemos estudar como ele mesmo é alterado pela existência do digital.
A existência do digital, por sua vez, facilita e norteia um dos pontos cruciais das Humanidades Digitais: a defesa enfática do compartilhamento maximizado da produção científica, em todas as etapas em que isso for possível. As HD representam uma convergência de vários conjuntos de valores, incluindo aqueles das Humanidades, bibliotecas, museus e organizações de patrimônio cultural: às vezes, esses valores podem estar em conflito, mas em seu âmago compartilham o interesse comum em avançar o conhecimento e servir ao público. Em certo sentido, as HD reconfiguram as Humanidades para a era da Internet, permitindo a troca de ideias na rede, criando comunidades de prática, e construindo conhecimento. O The Digital Humanities Manifesto 2.0 (2009) deliberadamente coloca as HD no contexto dos valores tradicionais humanistas, dizendo que as HD procuram revitalizar a tradição em um tempo em que a cultura está mudando da forma de disseminação de conhecimento do impresso para o digital. As HD estão fundamentadas nas Humanidades mas são catalisadas pelos valores da Internet, empurrando as Humanidades para um novo território ao promover colaboração (ou seja, a necessidade de trabalhar com pessoas com habilidades diferentes para contribuir digitalmente), abertura (comprometimento com a troca de ideias, o desenvolvimento de conteúdo aberto e softwares, além da transparência; a abertura também promove o principal objetivo das humanidades: a democratização do conhecimento, chegando ao público em geral além do acadêmico), e experimentação (sugere não apenas o método de testar ideias e criar conhecimento, mas também o engajamento da comunidade na transformação de enfoques tradicionais para o ensino e pesquisa).
Sendo muito recente, as Humanidades Digitais ainda passam por debates sobre a sua conceituação, sobre aquilo que realmente é. Tomarei por base algumas ideias de Erik Champion em seu livro Critical Gaming: interactive History and Virtual Heritage (2015) que, ao meu ver, consegue não apenas convencer o leitor de que as Humanidades Digitais são uma área cognitiva relevante, como também transmite suas ideias de modo claro e didático (como todo acadêmico deveria fazer, em minha opinião).
Uma das preocupações centrais de Champion é combater a noção ainda muito presente de que as HD são principalmente “serviços computacionais aplicados à digitalização e processamento de texto e literatura” (CHAMPION 2015: 5). Pensada assim, as HD seriam representadas apenas por ferramentas digitais de análise textual (por exemplo, algum programa que fizesse uma relação de quantas vezes uma determinada rua é mencionada no calhamaço Ulisses de James Joyce e quais personagens transitaram por ela), ou, então, seriam os PDFs originados a partir do escaneamento de livros físicos. Erik Champion, no entanto, utiliza o primeiro capítulo de seu livro para questionar esse uso “tradicional” das HD e para afirmar que visualizações não baseadas em textos também podem ser levadas em consideração (e, muitas vezes, trazendo mais benefícios no campo do conhecimento). Mais: Champion lança uma questão interessante ao leitor (2015: 7) – por que grande parte das aplicações no campo das HD são baseadas em computadores desktop? Por que não podem ser também inseridas na Realidade Virtual ou demais ambientes não baseados em desktop? A resposta a essa pergunta, creio eu, deve-se mais às limitações de recursos financeiros por parte das universidades do que má vontade ou falta de capacidade dos pesquisadores: somente em 2016 é que a Realidade Virtual teve o seu boom, com o lançamento de diversos dispositivos (principalmente HMDs) a preços voltados ao consumidor final. Certamente até 2020 o uso da Realidade Virtual será algo comum para todos, tal como são os smartphones hoje em dia.
Champion segue seu capítulo com mais um apontamento com o qual eu concordo: ele diz que a predileção por material baseado em textos é limitadora quando queremos alcançar um público amplo (2015: 10). Segundo um relatório da UNESCO de 2014, citado pelo autor, embora 84% dos adultos ao redor do mundo saibam ler, ainda enfrentam dificuldades em interpretar textos. Somada essa questão aos 16% de adultos analfabetos, fica claro que nem sempre utilizar apenas textos em aplicações digitais pode ser a melhor solução para o que almejamos. Assim, se bem desenvolvida, uma aplicação de HD pode ser centrada em visualização não-textual e, ao mesmo tempo, contar uma história, gerando significados. Talvez o maior exemplo desse caso sejam os jogos (games). Para o autor (2015: 32), “um jogo é um desafio que oferece a possibilidade, temporária ou permanente, de resolução tática sem resultados prejudiciais ao mundo real do participante”. Um jogo também deve ter algumas regras que o participante/usuário deve conhecer para dar andamento à experiência a fim de completar seu objetivo principal. Porém, é importante ter em mente que o modo como um designer elabora um jogo é diferente do modo como um jogador o experiencia. Jogos vão além de modelos: são simulações. Como é sugerido por Champion (2010: 90), as simulações históricas deveriam alcançar os seguintes objetivos:
- Providenciar (a certo ponto da experiência) uma estrutura na qual o jogador (talvez “participante” seja uma palavra melhor) obtenha uma visão geral do que foi documentado, simulado e construído;
- Transmitir um sentido de contexto histórico e o modo no qual ele modelou as ações dos habitantes;
- Ajudar os participantes a entender e explicar a informação de uma forma que melhor se adapte a eles, e não ao designer, e permitir diferentes caminhos, ações e seleção de metas;
- Encorajar os participantes a buscarem mais informações para eles mesmos além da simulação histórica.
Jogos eletrônicos lidam com imersão (que é subjetiva, claro) e interação em tempo real (pois você controla as ações de seu personagem na tela). Desse modo, os jogos eletrônicos são, quantitativamente, os maiores responsáveis pela difusão da Realidade Virtual em nosso mundo atual.
Por fim, deixo aqui a sugestão sobre um documentário acerca dos videogames no Brasil:
Leitura recomendada
› PINA, Amanda Daltro de Viveiros. Os artefatos podem jogar? A digitalização do patrimônio arqueológico em jogos eletrônicos. Orientador: Diogo Menezes Costa. Dissertação de Mestrado, UFPA, 2019.
› MARQUES, Lilian Cordeiro Lima. Escavando bits: uma arqueologia de Horizon Zero Dawn. Orientador: Andres Zarankin. TCC, FAFICH, UFMG, 2018.
› SCHREIBMAN, Susan, SIEMENS, Ray & UNSWORTH, John (eds.). A Companion to Digital Humanities. Malden: Blackwell, 2004.
Obra de referência quando se trata de Humanidades Digitais. Cada capítulo apresenta um elemento das HD.
› SCHREIBMAN, Susan, SIEMENS, Ray & UNSWORTH, John (eds.). A New Companion to Digital Humanities. Malden: Blackwell, 2016.
Revisão e ampliação da obra de referência quando se trata de Humanidades Digitais. Cada capítulo apresenta um elemento das HD.
› GOLD, Matthew K. (ed.). Debates in the Digital Humanities. Minneapolis: University of Minnesota Press, 2012.
Livro com discussões aprofundadas sobre as HD.
›BUSA, Roberto. “The Annals of Humanities Computing: the Index thomisticus”. In: Computers and the Humanities, v.14, 1980, pp. 83-90.
Artigo de Busa fundador das HD.
› CHAMPION, Erik. Critical gaming: interactive history and virtual heritage. Surrey: Ashgate, 2015.
Excelente livro sobre construções históricas digitais.
› MARINO, Vinicius. “History and human agency in videogames”. In: Gamevironments, v. 5, 2016, pp. 104-131.
Quer saber mais sobre a agência humana em jogos? O artigo do Vinicius é obrigatório e pode ser acessado aqui.
› MARINO, Vinicius. “Videogames as tools for Social Science History”. In: The Historian (Kingston), v. 79, 2017, pp. 794-819.
O artigo pode ser acessado aqui.
Leitura recomendada sobre Jogos Eletrônicos (Lista elaborada pelo Doutorando Vinicius Marino Carvalho)
› BARTLE, Richard. Hearts, clubs, diamonds, spades: players who suit muds. 1996.
› BOGOST, Ian. Persuasive games. The expressive power of videogames. The MIT Press: Cambridge, London, 2007.
› SHERRY, John L. et al. “Video game uses and gratifications as predictors of use and game preference”. 1996. In: International Journal of Sports Marketing and Sponsorship, January, 2006.
› JUUL, Jesper. “The game, the player, the world: looking for a heart of gameness”. In: Level Up: Digital Games Research Conference Proceedings, edited by Marinka Copier and Joost Raessens, 30-45. Utrecht: Utrecht University, 2003.
O artigo pode ser acessado aqui.
› AARSETH, Espen. “Computer Game Studies, Year One”. In: The International Journal of Computer Game Research, volume 1, issue 1, July, 2001.
O artigo pode ser acessado aqui.
>Website sugerido: Quantic Foundry
Jogo recomendado
Vou recomendar o RTS gratuito chamado 0 A.D. Você pode ir à página para baixar: Acesse.
Filme recomendado
Não é um filme, mas é bem legal! Abaixo, a análise de nosso Grupo de Pesquisa CNPq ARISE – Arqueologia Interativa e Simulações Eletrônicas sobre o jogo acima recomendado, 0 A.D.
Aula 8 (Teoria) – “Altered Carbon” e o Pós-Humanismo
Vimos até agora que a Cibernética lida com o controle sobre a informação. Ela tem sido assim antes mesmo de receber esse nome. As artilharias antiaéreas da Segunda Guerra Mundial já lidavam com o processamento de informações inseridas pelos soldados a fim de gerar uma saída de dados correta que “dissesse” em que lugar do céu o avião inimigo estaria dentro de um determinado período. Norbert Wiener, na década de 1940, formalizou os estudos sobre informação em uma nova área de pesquisa, a cibernética. Nas décadas seguintes, a informação foi controlada por robôs e também serviu para criar dispositivos artificiais que controlassem a informação dos corpos humanos (criando os ciborgues). O controle da informação também se fez presente quando começamos a criar ambientes virtuais e trabalharmos neles. A Realidade Virtual nada mais é do que o controle de informações em um espaço que não é “real”.
Mas, afinal, o que é informação?
De acordo com a raiz latina, informação vem do nominativo informatio que, por sua vez, deriva do verbo informare, significando “dar forma à mente”.
Pessoalmente, gosto bastante dessa definição etimológica, pois ela nos permite uma grande abertura do leque de possibilidades de uso. Sendo a informação algo que dá forma ao que temos em mente, todas as nossas vidas estão baseadas nela: nós enxergamos com os olhos, mas as imagens são formadas no cérebro para que possamos interpretá-las; uma poesia é a concretização de nossos sentimentos mais profundos; um desenho feito no papel ou em uma parede de caverna é um modo de dar forma às imagens que temos em mente; um algoritmo desenvolvido num computador é a sequência de processos que previamente pensamos; e por aí vai.
Contudo, quando pensamos em informação, quase sempre nos vem à mente códigos escritos, sejam em forma de letras, sejam como números. Nem sempre damos valor à informação oral, pois ela tende a se dissipar mais rapidamente com o passar do tempo (embora seja incontestável a importância da figura do aedo grego – pessoa responsável por narrar oralmente as histórias de seu povo – por exemplo). E também não devemos nos esquecer que somos bombardeados diariamente com dezenas de milhares de informações invisíveis, tais como ondas de rádio e TV, além de internet Wi-Fi e sistemas de telefonia móvel. Se tivéssemos uma visão capaz de enxergar todas informações que nos perpassam a cada instante, certamente veríamos um mundo admiravelmente novo!
Olhando por essa perspectiva, a informação parece toda hora migrar de mídia. Tambores, eletricidade, ondas de rádio, internet sem fio… Ela se origina em um corpo, mas não necessariamente fica atrelada a ele. Isso, em minha opinião, é fundamental saber quando lidamos com transmissão de informações: cada vez mais estamos ficando libertos de receptáculos de informação. Ainda somos as máquinas de sobrevivência regidas por genes, tal como o biólogo Richard Dawkins propõe em seu livro O Gene Egoísta (1976), mas até mesmo isso estamos sendo capazes de modificar. Muito em breve deixaremos de ser humanos e passaremos a ser “algo além de humano”, seremos pós-humanos. Estamos perdendo nossos corpos como os conhecemos. E, consequentemente, nossas informações estão sendo remodeladas.
O corpo é diferente da corporificação. Nossos corpos são normativos, são uma organização estruturada: tenho rins, coração, fígado, olhos, cérebro etc. Para eu continuar a viver, terei de ter esses órgãos, mesmo que sejam artificiais. Por uma pessoa ter recebido um implante de um coração artificial você passa a enxergá-la como máquina? Acredito que não… Semelhantemente, se amanhã ou depois descobrirem que os computadores ganham um poder de processamento nunca antes imaginável caso recebam enxertos de pele humana dentro de seus circuitos integrados, eles seriam humanos perante seus olhos? Também acredito que não…
A corporificação, por sua vez, é contextual. Quando o Doctor Who viaja com sua TARDIS para a Roma Antiga, ele não deixa de ser um alienígena do planeta Gallifrey, apenas corporifica a figura de um homem romano para poder interagir com o ambiente ao seu redor. Do mesmo modo, quando criamos um avatar em um mundo digital, ele é uma corporificação nossa, não o nosso corpo biológico de fato (isso fica bem claro no filme Avatar de 2009, dirigido por James Cameron).
A informação está descorporificada. Nós, humanos, continuamos a ter nossos corpos: com acréscimos de próteses artificiais ou não. Os seres humanos não perderam seu corpo. A informação, com o decorrer dos anos de estudos cibernéticos, deixou de ser corporificada, ou seja, presa a seu invólucro original, mas continua a ser informação (aquilo que dá forma ao que está na mente): o que acontece hoje em dia, simplesmente, é que essa informação – seja ela qual for – pode migrar de um lugar para outro. Isso é muito bem explorado no primeiro volume da série de livros Carbono Alterado, de Richard K. Morgan (e recentemente adaptado pela Netflix). Na história que se passa no futuro, toda a consciência humana é carregada em cartuchos implantados na base do cérebro de um corpo artificial denominado “capa”. Com os cartuchos, a humanidade praticamente se torna imortal (a não ser que o cartucho seja destruído, claro), fazendo com que, de tempos em tempos, as pessoas migrem de uma capa para outra. Há mudança de corpo, mas não há perda de informação. Recomendo o vídeo abaixo:
E justamente nessa migração de informação é que começa a existir uma diferença entre os humanos que éramos e os humanos que somos atualmente. O humanismo liberal do Iluminismo, aquele em que o sujeito existe como um ser natural (dono de si mesmo e completamente livre), como nos mostrou a evolução dos estudos cibernéticos, deixou de existir. Hoje não somos mais seres naturais, humanos puros (numa concepção liberal): a nossa inteligência é coproduzida com as máquinas inteligentes – é um processo simbiótico. Nós, agora, somos vistos como máquinas de processamento de informações semelhantes a outros tipos de máquinas de processamento de informações. Máquinas de sobrevivência orgânicas (segundo Dawkins) e máquinas artificiais ficaram dependentes. Deixamos de ser humanos. Tornamo-nos pós-humanos.
Calma!
Ser pós-humano não é motivo para que se jogue da varanda de seu prédio. Do mesmo modo, não lhe dá poderes mutantes como alguns X-Men. Você pode ficar tranquilo, as mudanças são sutis e graduais. Caso não tenha viajado com a TARDIS para outro planeta nas últimas duas décadas, tenho certeza de que já fez alguma pesquisa no Google, ou já baixou algum filme pirata, ou já recorreu à Wikipédia para sanar alguma dúvida. Não há vergonha alguma em admitir isso: você aprendeu com o seu computador. Entre os bilhões – ou mais – de bits armazenados nas nuvens espalhadas pelo mundo, você já obteve informação de alguns deles. Sua inteligência aumentou graças ao mundo digital dos computadores. E os computadores também aprenderam com você: não é surpreendente quando entramos na loja virtual da Amazon ou na Netflix e ali haja sugestões de produtos/filmes que realmente se encaixam em nossos perfis? Pois é, isso representa um acréscimo na inteligência das máquinas artificiais. Sejamos honestos: nós nos tornamos mais inteligentes conforme interagimos, seja com outros seres humanos, seja com outros animais, seja com o meio-ambiente, seja com nossas ferramentas, seja com computadores e outras máquinas artificiais. O sistema ecológico que habitamos não é mais apenas “natural”, é artificial também. Com o avanço da tecnologia e das próteses artificiais, provavelmente deixaremos de ser Homo Sapiens Sapiens e ganharemos outra nomenclatura, a de Homo Sapiens Silex.
Os estudos sobre pós-humanismo têm sido encabeçados por grandes autoridades nos campos da filosofia, engenharia, biotecnologia e ciência da computação. Dentre eles, o futurólogo Max More é um dos principais especialistas na área, tendo colaborado na redação da Declaração Transhumanista (Transhumanist Declaration) de 1998, a qual transcrevo abaixo:
1. A Humanidade será profundamente afetada pela ciência e tecnologia no futuro. Nós almejamos a possibilidade de alargamento do potencial humano ao superar o envelhecimento, as deficiências cognitivas, o sofrimento involuntário, e o nosso confinamento ao planeta Terra.
2. Acreditamos que o potencial humano ainda não foi realizado em sua maior parte. Há possíveis cenários que levariam a maravilhosas e extremamente valiosas melhorias nas condições humanas.
3. Reconhecemos que a humanidade encara sérios riscos, especialmente do mau uso de novas tecnologias. Há possíveis cenários realísticos que levariam à perda da maioria, se não todas, das coisas que valorizamos. Alguns desses cenários são drásticos; outros, sutis. Embora todo progresso seja mudança, nem toda mudança é progresso.
4. É necessário investir esforços de pesquisas no entendimento desses prospectos. Precisamos cuidadosamente deliberar qual o melhor meio de reduzir riscos e agilizar aplicações benéficas. Também precisamos de fóruns nos quais as pessoas possam construtivamente discutir o que pode ser feito e uma ordem social em que as decisões responsáveis possam ser implementadas.
5. Redução dos riscos da extinção humana, desenvolvimento de meios para a preservação da vida e da saúde, o alívio de sofrimentos graves e o aperfeiçoamento da precaução e sabedoria devem ser buscados como prioridades urgentes e generosamente financiados.
6. Decisões políticas devem ser guiadas por visão moral responsável e inclusiva, pesando seriamente as oportunidades e os riscos, respeitando a autonomia e os direitos individuais, e demonstrando solidariedade e preocupação com os interesses e dignidade de todas as pessoas ao redor do globo. Também devemos considerar nossas responsabilidades morais para com as gerações que existirão no futuro.
7. Nós defendemos o bem-estar de toda senciência, incluindo humanos, animais não-humanos, qualquer intelecto artificial futuro, formas de vida modificadas, ou outras inteligências às quais o avanço tecnológico e científico possa trazer.
8. Favorecemos liberdade morfológica – o direito de modificar e aperfeiçoar o corpo, a cognição e as emoções. Essa liberdade inclui o direito de usar ou não técnicas e tecnologias para estender a vida, preservar o ser por meio de criogenia, upload, e outros meios, e a escolher futuras modificações e aperfeiçoamentos.
Max More e Natasha Vita-More editaram o livro The Transhumanist Reader (2013), que, trazendo uma coletânea de ensaios de diversos autores expoentes, se tornou referência absoluta para aqueles que desejam se aprofundar na temática. Rapidamente, apresentarei alguns apontamentos interessantes dessa obra. O intuito, claro, não é esgotar o tema, até mesmo porque isso é impossível em qualquer área cognitiva: vou apenas pinçar aquilo que me auxiliará a dialogar a Arqueologia com a Realidade Virtual na próxima aula.
Falar de Pós-Humanismo é falar de Transhumanismo, e vice-versa. Alguns pesquisadores alegam que o transhumanismo é a ponte que faz a ligação entre o humanismo e o pós-humanismo. Outros, dizem que o transhumanismo é a filosofia que está presente na figura do pós-humano. Para fins de compreensão, aqui vou abordar o transhumanismo como a discussão por trás da questão tecnológica que nos permite sermos pós-humanos. Desse modo, para mim, o transhumanismo é, ao mesmo tempo, uma filosofia e um meio de se chegar ao pós-humanismo (entendendo-se por “meio” os aparatos tecnológicos que pensem, no nível mais fundamental, em um sistema binário).
O transhumanismo pode, sim, ser descrito como uma espécie de filosofia de vida não-religiosa que rejeita a fé, a veneração e o sobrenatural, enfatizando a vida sendo formada por razão, ciência, progresso e o valor da existência. Pessoalmente, tenho ressalvas com o termo “progresso”, pois ele facilmente pode ser mesclado com “evolução” e, assim, erroneamente, abrir precedentes para eugenias e outras “teorias” de pureza. Porém, o transhumanismo tem o progresso como uma de suas pedras angulares e, tal como afirma Max More, suas raízes estão no Iluminismo, concebendo a ideia como uma possibilidade e desejo, não uma inevitabilidade. Assim, o progresso segundo os transhumanistas se opõe à fé, uma vez que nós devemos criar melhores futuros – com base na razão, tecnologia, método científico e criatividade humana – ao invés de esperarmos ou rezarmos para forças sobrenaturais.
Uma grande diferença entre humanismo e transhumanismo está na ênfase que o último dá aos meios e fins. Enquanto o humanismo tende a depender exclusivamente do refinamento educacional e cultural para melhorar o ser humano, o transhumanismo emprega a tecnologia para superar os limites impostos por nossas heranças biológicas e genéticas. Para os transhumanistas, a natureza humana não se fecha em si mesma nem é vista como perfeita: ela apenas é um ponto na trilha evolucionária e nós podemos aprender a remodelar nossa própria natureza de modos que consideremos desejáveis e valiosos. “Ao ponderada, cuidadosa e ousadamente aplicarmos tecnologia a nós mesmos, podemos nos tornar alguma coisa não mais precisamente descrita como humano: podemos nos tornar pós-humanos” (MORE & VITA-MORE 2013: 4). A definição de Max More sobre o ser pós-humano é emblemática e merece ser citada por inteiro (2013: 4):
“Tornar-se pós-humano significa exceder as limitações que definem os aspectos menos desejáveis da ‘condição humana’. Seres pós-humanos não deverão mais sofrer com doenças, envelhecimento e morte inevitável (…). Eles poderão ter grandes capacidades físicas e liberdade de forma – geralmente referida como ‘liberdade morfológica’ (…). Pós-humanos deverão também ter grandes capacidades cognitivas, e emoções mais refinadas (mais alegria, menos raiva, ou quaisquer mudanças que cada indivíduo desejar). Transhumanistas tipicamente tentam expandir a gama de possíveis ambientes futuros para a vida pós-humana, incluindo a colonização do espaço e a criação de ricos mundos virtuais. Quando os transhumanistas se referem à ‘tecnologia’ como o meio primário de mudanças efetivas na condição humana, isso deve ser entendido de modo amplo a fim de incluir a concepção de organizações, economias, políticas e o uso de métodos e ferramentas psicológicas”.
Outro ponto marcante do transhumanismo é aquilo que Max More denomina racionalismo crítico. Baseado na obra do filósofo da ciência austríaco naturalizado britânico Karl Popper, o racionalismo crítico difere radicalmente das ideias do Iluminismo. Muitos pensadores iluministas defendiam o fundacionalismo, dizendo que as teorias epistemológicas deveriam ser calcadas em crenças básicas ou fundamentos para a elaboração do conhecimento. O racionalismo crítico, por sua vez, rejeita essa justificativa centrada em uma autoridade (podendo ser Deus) para afirmar que não existem fundamentos para o conhecimento: adquirir ou aperfeiçoar o que sabemos é baseado essencialmente em conjunturas e críticas.
Do mesmo modo, a questão da identidade para os transhumanistas acaba sendo importantíssima. A maioria dos pesquisadores descrevem a si mesmos como materialistas, fisicalistas ou funcionalistas: acreditam que nossos pensamentos e sentimentos (ou sensações) são essencialmente processos físicos. Assim, os transhumanistas são funcionalistas, ou seja, propalam que o “eu” tem de ser instanciado em algum tipo de meio físico, mas não necessariamente humano (ou biológico). Por exemplo, se os neurônios biológicos de alguém forem sendo, gradualmente, substituídos por neurônios artificiais que funcionem cognitivamente do mesmo jeito, a mesma mente e personalidade irá persistir apesar de estar em um substrato não-biológico (MORE & VITA-MORE 2013: 7). O funcionalismo, assim, é uma forma de fisicalismo que difere da teoria da identidade (um estado mental é idêntico a um estado específico do cérebro) e do behaviorismo (termos mentais podem ser reduzidos a descrições comportamentais): os estados mentais são relações causais com outros estados mentais, sensores de entrada e saídas comportamentais. “Por estarem os estados mentais constituídos por seu papel funcional, eles podem ser lançados em múltiplos níveis e manifestarem-se em muitos sistemas, incluindo os não-biológicos, desde que o sistema apresente as funções apropriadas” (MORE & VITA-MORE 2013: 7).
Por fim, devo ressaltar que um dos aspectos do transhumanismo (ou pós-humanismo) que mais interessa a este trabalho que está lendo é a simulação, sendo ela desenvolvida em ambientes virtuais. Em outras palavras, o transhumanismo também trabalha com a Realidade Virtual. Veremos como isso se desenrola ao abordarmos a Ciberarqueologia em nossa próxima aula. Termino aqui com a sugestão desse excelente debate:
Leitura recomendada
› MORE, Max & VITA-MORE, Natasha (eds.). The transhumanist reader: classical and contemporary essays on the science, technology, and philosophy of the human future. West Sussex: John Wiley & Sons, 2013.
O capítulo 1 oferece um panorama do transhumanismo. É excelente.
› HAYLES, N. Katherine. How we became posthuman. Virtual bodies in cybernetics, literature, and informatics. Chicago: The University of Chicago Press, 1999.
A obra de Hayles traça a trajetória da Cibernética e, ainda por cima, aprofunda os temos do pós-humanismo. É um livro obrigatório! Deixo aqui a conclusão do livro.
Jogo recomendado
Dex (2015) é um jogo ótimo. Para quem gosta de cyberpunk e questões ligadas ao pós-humanismo, é um prato cheio!
Filme recomendado
Obviamente, a sugestão é a série Altered Carbon (2018) da Netflix.
Aula 9 (Teoria) – Ciberarqueologia – o diálogo entre Arqueologia e a Cibernética
Enfim chegamos à aula que dá o nome a este curso: falaremos sobre Ciberarqueologia!
A essa altura, você já terá uma ideia do que esse conceito significa. Basta desmembrar a palavra para notarmos que nada mais é do que uma junção entre Cibernética e Arqueologia. “Mas, tendo estudado tudo o que estudei até agora, posso dizer que ‘cibernética’ é uma concepção muito ampla” – você, corretamente, irá afirmar. Concordo plenamente! É necessário que digamos o que “cibernética” significa nesse contexto. Vamos chegar lá daqui a pouco. Adianto, no entanto, que estamos falando sobre a Realidade Virtual presente no campo cibernético.
“Se a ideia gira ao redor da R.V., por que não denominarmos Arqueologia Virtual ao invés de Ciberarqueologia?” – novamente você me perguntar. Creia-me, o termo “Arqueologia Virtual” já existiu. E não faz muito tempo. Em 1990, o cientista da computação Paul Reilly publicou o artigo Towards a Virtual Archaeology, que iria despertar parte da comunidade científica arqueológica para o tema da computação gráfica. Resumindo a ideia central do artigo, podemos dizer que cabe ao arqueólogo identificar os pontos críticos (ou seja, principais) de uma escavação para que ela possa, depois de terminado o trabalho, ter seus dados computados e gerar uma simulação tridimensional. Todos os arqueólogos sabem que, mesmo com o desenvolvimento de técnicas não invasivas, nós ainda somos grandes destruidores: nossa função é trazer à luz significados obtidos de artefatos por meio de escavações sistemáticas. Uma vez escavado, o contexto anterior está perdido. A cada camada temos de registrar nosso trabalho para que depois possamos recuperá-lo em laboratório e darmos sentido a todo esse monstro do Dr. Frankenstein chamado Arqueologia. O que Paul Reilly propôs é irmos além do registro em papel: com os computadores, podemos recriar as etapas de escavação com seus contextos originais, facilitando o entendimento e permitindo que futuros pesquisadores possam visualizar como foi o trabalho de campo mesmo não tendo estado presentes lá.
É preciso prestar atenção ao conceito de “simulação” ao qual Reilly se refere em seu artigo. Estávamos no início dos anos 1990 quando ele cunhou a Arqueologia Virtual. Apesar de os computadores pessoais começarem a se tornar mais comuns na época, o seu poder de processamento era ainda bastante limitado. A simulação, nesse caso de Reilly, é uma simulação passiva, ou seja, o arqueólogo apenas visualizava os resultados prontos na tela do monitor. Os cálculos matemáticos transformavam os registros de campo em registros digitais e mostravam na tela os modelos finais. Diferentemente da simulação proposta pela cibernética (por exemplo, em jogos eletrônicos), a “simulação” da Arqueologia Virtual eram, na verdade, vídeos renderizados.
Em 2010 foi publicado o volume da coleção BAR International Series denominado Cyber-Archaeology. Editado por Maurizio Forte, a coletânea traz artigos de dois workshops ocorridos 2009 e 2010 que versaram sobre ciberarqueologia e ambientes virtuais colaborativos para o patrimônio cultural. Na introdução da obra, Maurizio Forte discorreu sobre os principais pontos da ciberarqueologia. Seu texto ainda hoje é usado como base para os estudos nessa área. Vou agora apontar alguns tópicos presentes nele.
Primeiramente, fica claro que é difícil introduzir e definir possíveis limites, fraquezas e potencialidades de um novo campo de pesquisa em relação às novas tecnologias, altos níveis de corporificação, sistemas imersivos e redes de trabalho sociais 3D: a ciberarqueologia ainda é muito recente para fazermos um balanço tão profundo. Como o próprio nome diz, a ciberarqueologia trabalha com um processo de interpretação que está calcado na perspectiva cibernética: o feedback criado por diferentes interatores operando o mesmo ambiente gera outros feedbacks, não interconexões pré-determinadas. O centro desse processo interpretativo – e consequentemente da geração de conhecimento – não está no modelo, dados ou ambientes, mas, sim, nas relações mútuas produzidas pela interação/corporificação. Estando a cognição da interação/corporificação, desse modo, atrelada à experiência motor-perceptiva, toda a informação dos objetos se forma em um sistema recíproco entre observadores e observados. Em outras palavras, “a interação cibernética ou o comportamento em um ambiente virtual podem ser totalmente reconsiderados como uma troca de informação entre organismo e ambiente” (FORTE 2010: 9). Assim, o princípio básico é que percepção e ambiente são governados por propiciamentos (affordances) que são desenvolvidos durante o processo de simulação, representando a ligação virtual entre objeto e ambiente, ou seja, o código para reinterpretar o passado no espaço e no tempo.
Ainda em seu texto, Maurizio Forte elenca características marcantes dentro do contexto ciberarqueológico. Cabe aqui a citação por extenso (2010: 10), e minhas explicações logo abaixo de cada item, em itálico:
a) A ciberarqueologia pode representar hoje uma trilha de pesquisa de simulação e comunicação, na qual (…) o feedback representa seu núcleo. A arqueologia faz parte inteiramente da sociedade contemporânea e é porta de acesso (gateway) para o mundo antigo: ela não pode representar o mundo antigo. O processo cibernético cria propiciamentos e através deles nós somos capazes de gerar mundos virtuais por meio de interações e interconexões;
Por estar em um ambiente virtual tridimensional, o feedback se torna ainda mais rápido e passível de análise. Lidando a ciberarqueologia com simulações, a retroalimentação é primordial, pois ela fará com que a comunicação entre usuário e ambiente virtual aconteça. Caso você já tenha jogado algum game de RPG (Role-Playing Game), saberá muito bem como esse feedback acontece: naqueles momentos em que você tem de escolher uma resposta – a uma personagem – dentre várias em uma lista, a retroalimentação fará com que a sua escolha influencie em todo o decorrer da narrativa e no próprio desenvolvimento de seu avatar. Já no caso de a arqueologia ser uma porta de acesso ao mundo antigo, Maurizio Forte está reiterando aquilo que é essencial saber quando trabalhamos com simulações: elas são interpretações, não representações de um passado, pois é impossível nós representarmos (falarmos em nome) aquilo que deixou de existir há tanto tempo. O que a ciberarqueologia faz é nos propiciar meios de entendermos o passado: ela não é o passado ressuscitado.
b) A ciberarqueologia não é necessariamente visual: é dinâmica, interativa, complexa, autopoiética e não necessariamente orientada ao fotorrealismo;
Quando diz que a ciberarqueologia “não é necessariamente visual”, Maurizio Forte está se referindo à Arqueologia Virtual que, como já vimos, é completamente passiva. Cabe ressaltar o interessante aspecto mencionado pelo autor, o do fotorrealismo: é comprovado que não precisamos estar imersos em ambientes virtuais visualmente arrebatadores no ponto de vista de “ser real” para aprendermos algo naquele ambiente. Mais uma vez, podemos recorrer aos videogames: quantos não foram os jogos em estilo cartunesco (ou até mesmo “quadrado”, como no caso dos antigos games do Atari ou do Minecraft) que fizeram com que você entrasse em estado de flow, esquecendo-se do mundo ao seu redor? Isso prova que gráficos fotorrealistas não são pré-requisitos para a R.V.
c) O passado não pode ser reconstruído, mas, sim, simulado. A simulação cibernética desenvolve propiciamentos e neles as relações constituem a potencialidade do processo de interpretação;
Como dito no item a), não existe reconstrução do passado mas, sim, simulação. A ciberarqueologia trabalha com o virtual, ou seja, na concepção de Pierre Lévy, com aquilo que pode ou poderia ser real.
d) Passado em potencial: é mais apropriado pensar em um passado em potencial, um tema co-evolutivo na evolução humana gerado por ciberinterações entre mundos;
O passado em potencial pode ser visto, novamente, dentro da noção de Lévy para o virtual.
e) A validação desse processo ciberarqueológico depende dos relacionamentos entre as sociedades do passado e do presente;
No caso da validação cibernética oriunda dos relacionamentos entre sociedades do passado e do presente, acredito que Maurizio Forte se refira aos estudos sobre o passado necessários ao bom entendimento por nós, pessoas do agora. Porém, confesso que esse ponto ainda é um pouco desconexo para mim.
f) A ciberarqueologia é um processo de reconstrução-simulação. A arqueologia do terceiro milênio é capaz de processar, interpretar e comunicar muito mais dados e informação do que nos últimos dois séculos;
Apesar de concordar com o fato de nós termos mais informações hoje em dia do que nos últimos dois séculos, discordo da afirmação do autor sobre a ciberarqueologia ser um processo de reconstrução. Mais à frente explicarei o porquê.
g) Nos anos 1990 a maior parte dos projetos de pesquisa em arqueologia virtual era orientada visualmente; agora nós pensamos que, no terceiro milênio, eles devem ser ciberneticamente orientados;
Novamente, o contraponto entre Arqueologia Virtual e a Ciberarqueologia: enquanto a primeira é puramente visual e passiva, a última busca nas interações presentes na simulação a sua razão de ser.
h) A capacidade de transmitir conhecimento e interpretação depende da complexidade de diversos fatores: tecnologia, formato, precisão, indução-dedução, comunicação, contexto, ontologias etc. Estamos cientes de quantos dados podem ser produzidos e disseminados nesta Era? E quão rápido é esse processo?;
A tecnologia envolvida na ciberarqueologia abarca várias áreas e sempre estará em desenvolvimento conforme a Engenharia avançar. Acredito que todo o processo de dados se tornará ainda mais rápido no futuro e, com relação ao armazenamento de dados, temos pesquisas bastante profícuas nas áreas de Cloud Computing (Computação em Nuvem) e Big Data para guardar e analisar toda essa informação. E por trabalharem sempre com o conceito de elasticidade, praticamente não há limites de armazenagem e processamento nesses campos de pesquisa.
i) A ontologia virtual da informação arqueológica, ou da cibernética arqueológica, refere-se a todas as relações interconectadas que o datum (dado) produz, o código de transmissão, e sua transmissibilidade;
A natureza da ciberarqueologia são as relações interconectadas (ou seja, desde a escavação até o processamento computacional) que um dado produz.
j) O datum nunca é neutro e, consequentemente, nós temos de aperfeiçoar as propriedades dos propiciamentos.
Um dado obtido e trabalhado pela ciberarqueologia nunca é neutro: passa tanto pelo crivo do passado, quanto do presente e da tecnologia empregada em sua obtenção. Assim sendo, é necessário que os pesquisadores melhorem os meios de propiciar sua divulgação.
Desse modo, o texto de Maurizio Forte nos dá uma boa ideia do que é ciberarqueologia e optei por usá-lo como base aqui na discussão sobre ciberarqueologia por apresentar todos os conceitos fundamentais dessa área. Na bibliografia do curso, você encontrará uma vasta lista de outros artigos relacionados à ciberarqueologia (e estudos de casos) caso tenha interesse em aprofundar o conhecimento.
Antes de fornecer a minha definição de ciberarqueologia, gostaria de retomar a questão de “reconstrução” na arqueologia. Fui convencido pelas ideias apresentadas por Jeffrey T. Clark em seu artigo The Fallacy of Reconstruction (2010) de que, na verdade, a palavra “reconstrução” é bastante falha. Segundo Clark, se afirmarmos que algo foi “reconstruído”, isso significará que esse algo foi recriado justamente como era. Isso significaria que alguém sabia absolutamente como algo costumava ser e o replicou – implicando certo grau de “verdade”. Nas palavras do autor (CLARK 2010: 63-64): “Alguém pode ser capaz de reconstruir um vaso quebrado a partir dos fragmentos, ou uma casa queimada seguindo a planta original e as fotografias, mas ninguém pode reconstruir uma casa que existiu certa vez no passado e da qual temos informação fragmentada sobre traços característicos e artefatos. O que alguém pode fazer é construir um modelo, verbal ou visual, de como a casa pode ter se parecido (dada a evidência disponível). Quanto mais complexo for o fenômeno que estamos examinando arqueologicamente, mais difícil é reconstruí-lo”.
Assim, dizer que alguém criou uma reconstrução arqueológica, na maioria dos casos, é falacioso. Isso não é sinônimo de malicioso, mas, sim, é um legado da disciplina arqueológica que vem sendo perpetuado. O surgimento do termo “reconstrução” no contexto arqueológico apareceu pela primeira vez no trabalho de Alfred Kroeber – discípulo de Franz Boas – em 1937, durante o Histórico-Culturalismo. Escrevendo o verbete sobre arqueologia para a Encyclopedia of the Social Sciences, Kroeber afirmou: “Arqueologia – etimologicamente o estudo dos começos – tem a reconstrução histórica como seu objetivo”. Essa noção de que a reconstrução histórico-cultural era o foco principal da arqueologia se enraizou na disciplina e fez com que os arqueólogos buscassem por meio da descoberta e estudo de normas culturais a “reconstrução” da cultura no decorrer do tempo.
Nos anos 1940 e 1950, a reconstrução ganhou novo ímpeto e passou a ser estudada sob o viés de reconstrução de estilos de vidas passados graças ao estreito diálogo com a etnografia. Já nas décadas de 1960 e 1970, a Nova Arqueologia (ou Processualismo), apesar de fazer duras críticas à reconstrução histórico-cultural, acabou, ironicamente, por reforçar essa ideia justamente no trabalho de um dos seus maiores expoentes. Lewis Binford no capítulo Archaeological Perspectives, presente no livro New Perspectives of Archeology (1968), identificou três objetivos da arqueologia: 1) a reconstrução da história cultural; 2) a reconstrução dos estilos de vidas passados; 3) o estudo do processo cultural. Por fim, a partir da década de 1980, com a crítica feita ao Processualismo pelo Pós-Processualismo de Ian Hodder, Michael Shanks, Christopher Tilley e outros, o papel da interpretação ganhou destaque, juntamente com o aprofundamento dos conceitos de contexto, multivocalidade e agência. Desse modo, já não é mais correto falar em a reconstrução do passado: agora existem muitas, embora o termo “reconstrução” ainda seja largamente utilizado.
Walter Taylor já havia discorrido sobre a falácia da reconstrução na década de 1940, como podemos ver no excerto a seguir (TAYLOR 1948: 35-36 apud CLARK 2010):
“(…) será bom comentar sobre a falácia e o perigo engendrados pelo uso do termo reconstrução histórica. As palavras reconstrução e ressíntese são fundamentalmente erradas e têm sido responsáveis por muita perda de confiança, particularmente entre os antropólogos (…). Se não se pode dizer com certeza se o passado foi ou não recriado em detalhe ou em essência, não pode ser dito que esses contextos são ou não ressíntese ou reconstruções. Esses termos implicam em uma reconstrução exata das especificações anteriores as quais (…) não podem ser verificadas e, assim, conhecidas. O desconhecido não pode ser tomado como um valor padrão. Portanto, argumentos prós e contra a reconstrução histórica na antropologia ou em qualquer outra disciplina [histórica] são irrelevantes, e torna aparente que o trabalho de todas as disciplinas históricas realmente leva à construção e síntese, não à reconstrução e ressíntese. Disto, a real tarefa dos estudantes em disciplinas históricas está em enxergar quão plausíveis e aceitáveis as construções podem ser feitas. Nem os antropólogos nem os historiadores deveriam usar o termo reconstrução, pois soa inadequado: eles sabem que sua pesquisa nunca irá permiti-lo, realmente, reconstruir a vida de tempos passados com certeza e em sua completude. Ao invés disso, deveriam perceber que até mesmo os contextos escritos dos melhores e mais completos arquivos são construções e que as diferenças residem na natureza dos respectivos dados, não nos fatores teóricos básicos”.
Apesar do esforço de Taylor, a noção de “reconstrução” permaneceu – e permanece – na arqueologia. Se não podemos, então, denominar “reconstrução”, como chamamos a esse processo e produto? Segundo Jeffrey Clark (2010: 67), nós construímos modelos, e se quisermos chamá-los modelos científicos ou modelos interpretativos, as características básicas são as mesmas. Os modelos são afirmações das relações entre múltiplas variáveis que oferecem uma descrição ou explicação sobre algum fenômeno. Ao contrário do que se pode pensar (ainda mais se continuarmos dentro das ideias de “reconstrução”), os modelos não representam o ponto final de uma pesquisa: eles são ferramentas construídas a fim de nos ajudar a pensar e a melhorar nossa compreensão sobre algum fenômeno complexo. Para o autor (CLARK 2010: 67-68):
“Modelos são produzidos a partir do diálogo entre observações empíricas, pressupostos, interpretação lógica e extrapolação, e imaginação criativa. (…) Por definição, modelos não são a coisa real: são simplificações. Como simplificações, alguma coisa é deixada de fora, e os modelos são, assim, sempre falsos. Informação é deixada de fora ou porque é desconhecida, ou porque poderia providenciar detalhes desnecessários ao propósito do modelo. (…) Nesse sentido, então, ao construir um modelo alguém está seletivamente adicionando informação. (…) Do ponto de vista da arqueologia interpretativa, alguém sempre está adicionando informação baseado em uma inescapável subjetividade [do observador]. A adição seletiva de informação é o caso se alguém está lidando com um modelo verbal ou modelo visual (…). A seleção de informação é baseada naquilo que alguém sabe, pensa (consciente ou inconscientemente), presume e conjectura”.
Os modelos, então, são o produto da construção arqueológica. No caso da Arqueologia Virtual e da Ciberarqueologia, os modelos são tridimensionais. Deve-se, sempre, evitar chamar um modelo de “reconstrução”, pois, além de ser um termo problemático, pode levar à errada ideia de que o modelo é, de algum modo, falho ou que deve ser utilizado com ressalvas. A principal diferença entre os modelos da Arqueologia Virtual e da Ciberarqueologia é que os primeiros são usados passivamente, apenas por renderização de animações, enquanto os segundos são utilizados em tempo real.
Feitos esses apontamentos, posso, então, definir o que entendo por Ciberarqueologia.
A minha definição de Ciberarqueologia
“Ciberarqueologia” é um termo que parece muito fácil de ser assimilado quando ouvido (ou lido) pela primeira vez: logo pensamos em computadores, afinal, “cibernético” tem algo a ver com computadores, correto? Quem pensa assim, não está inteiramente errado. Sim, a ciberarqueologia lida com computadores. Mas a problemática é mais profunda. Como apresentei até agora, a cibernética é uma área de estudos bastante rica e complexa em definições. Quando analisada com cautela, vemos o quão interessante ela é, e como ela influenciou e foi influenciada por outras áreas cognitivas, como a biologia, a sociologia e, é claro, a arqueologia.
Recordo-me que não há muito tempo, ao conversar com o Prof. Dr. Marcelo Zuffo (Poli-USP) e lhe contar que estava estudando cibernética, ele me disse em tom preocupado: “Olha, tome cuidado com isso”. Eu ri, claro, mas só fui entender o que ele havia me alertado um tempo depois, quando finalmente mergulhei no mundo da cibernética para elaborar minha tese e esse curso. A cibernética é um campo maravilhoso, mas no qual podemos facilmente nos perder se não tomarmos cuidado. Isso acontece com a ciberarqueologia também: por ter a cibernética como uma de suas bases teóricas (a outra, obviamente, é a arqueologia), se não deixarmos claro a qual cibernética nos referimos e como trabalharemos com ela, corremos o risco de voltarmos à estaca zero de “uso de computadores na arqueologia”. Ora, arrisco-me a dizer que todos os arqueólogos usam computadores hoje em dia, pois, sem eles, não escreveriam seus relatórios, artigos, dissertações, teses e projetos de pesquisa. Isso é uma coisa. Outra bem diferente é usar computadores em conjunto com os trabalhos arqueológicos – e é isso o que a ciberarqueologia faz.
Embora a cibernética não esteja, assim como qualquer outra área, tão bem delimitada em suas definições, sendo que ainda hoje podemos lidar com homeostase ou, como sugere Maurizio Forte (2010: 10), a autopoiese, defendo o uso de conceituações de Realidade Virtual cibernética como base para estudos ciberarqueológicos.
Desse modo, para mim, a ciberarqueologia é uma arqueologia pós-humana.
Por que digo isso?
> A ciberarqueologia é pós-humana, pois trabalha com simulação (conforme proposta pelo transhumanismo) em realidade virtual. O grau de imersão nessas simulações pode variar e dependerá de fatores relacionados a softwares e hardwares, mas elas nunca deixarão de ser uma realidade virtual, um passado em potencial que, graças aos computadores, se tornam reais;
>A ciberarqueologia é pós-humana, pois apresenta-se como simbiose entre sistemas orgânicos e sistemas artificiais. O arqueólogo lida com elementos de Vida Artificial e Inteligência Artificial para elaborar a sua simulação em Realidade Virtual. Nós dependemos dos computadores e demais máquinas artificiais para avançarmos em nosso trabalho ciberarqueológico. Do mesmo modo, os computadores e demais máquinas virtuais dependem de nós, máquinas de sobrevivência orgânicas, para receberem updates e upgrades. As pesquisas nas áreas de Ciência da Computação e Engenharia podem ser impulsionadas pela pesquisa arqueológica, que estabelecerá novas barreiras tecnológicas a serem transpostas pelos profissionais da área de Exatas. Reciprocamente, o trabalho oriundo dos laboratórios de engenharia das universidades e empresas instigará os arqueólogos a utilizarem novas ferramentas tecnológicas em sua área.
> A ciberarqueologia é pós-humana, pois não se fecha em si mesma. Tal como propõe o transhumanismo, estamos em constante mudança. Essas mudanças podem ser físicas, como o acréscimo de próteses artificiais ou, futuramente, o upload ou download de dados para o cérebro, como também biológicas. Nós seremos diferentes. Nosso modo de fazer arqueologia será diferente: diretamente em conjunto com os sistemas artificias (sem haver hierarquização). A ciberarqueologia não fica (nem ficará) presa aos dogmas das correntes de pensamento arqueológico anteriores, pois sua própria conformação é expansível: não apenas está preocupada com a relação sistema/homem/ambiente – ela vai além, lidando com a relação homem/máquina na práxis arqueológica.
Estamos a poucos anos da Singularidade. Quando a alcançarmos, será muito improvável que o arqueólogo como o conhecemos hoje continue existindo: toda Arqueologia será uma Arqueologia Pós-Humana. Nossas relações com as máquinas serão tão naturais e tão simbióticas que aprenderemos, todos, a falar a linguagem dos sistemas artificiais (ou eles aprenderão a nossa). Desse modo, os arqueólogos também serão pós-humanos, pois estarão familiarizados com essa realidade artificial e com a informação migrando de corpos a todo o momento. Nós, arqueólogos, não mais apenas escavaremos e trabalharemos em nossos laboratórios como fazemos hoje: iremos, nós mesmos, ser responsáveis por elaborar nossas simulações pois elas serão algo corriqueiro. Assim, o arqueólogo pós-humano será alguém com habilidades avançadas em computação, podendo desenvolver códigos de programação, modelagens 3D e conhecendo o equipamento físico com o qual trabalhará. As hipóteses arqueológicas serão postas à prova em simulações de realidade virtual, permitindo o acesso colaborativo de todos os envolvidos nas pesquisas.
E aqui me despeço:
Leitura recomendada
› FORTE, Maurizio. “Introduction to Cyber-Archaeology”. In: FORTE, Maurizio (ed.), Cyber-Archaeology. Oxford: Archaeopress, BAR, v. 2177, 2010, pp. 9-13.
Recomendo o volume todo, mas deixarei aqui o capítulo utilizado na aula, que sintetiza as ideias centrais da Ciberarqueologia. Acesse aqui.
› CLARK, Jeffrey T. “The fallacy of reconstruction”. In: FORTE, Maurizio (ed.). Cyber-Archaeology. Oxford: Archaeopress, BAR, v. 2177, 2010, pp. 63-73.
Esse capítulo vai mudar sua vida. Sério. Acesse aqui.
› MARTIRE, Alex. “Ciberarqueologia: o diálogo entre Realidade Virtual e Arqueologia no desenvolvimento de Vipasca Antiga”. Cadernos do LEPAARQ (UFPEL), v. 14, pp. 29-52, 2017.
Artigo que resume minha tese de Doutorado. Acesse aqui.
› MARTIRE, Alex & BINA, Tatiana. “DOMUS R.A. and DOMUS REDUX: Cyber- Archeology extended to Education”. In: XVII Symposium on Virtual and Augmented Reality, 2015, São Paulo. 2015.
Artigo sobre os produtos ciberarqueológicos do LARP. Acesse aqui.
› TAYLOR, Walter W. “A study of archaeology”. In: American Anthropologist 50 (3), part 2, 1948, pp. 1-256.
Jogo recomendado
Obviamente vou puxar a sardinha pro meu lado e recomendar os produtos ciberarqueológicos que desenvolvi com o LARP e também o do meu Doutorado.
Sugiro que visite nossa domus romana no site do Laboratório de Arqueologia Romana Provincial do MAE-USP. Acesse aqui.
E aqui o Vipasca Antiga, o produto final de meu Doutorado. Acesse para baixar.
Filme recomendado
Recomendo a reportagem da Rede Globo com nossos colegas do MAE e da Poli-USP sobre ciberarqueologia em São Paulo.
PS: Por favor, a pronúncia correta é ciberarqueologia, não cyber(sái-bêr)arqueologia…
Veja aqui: https://globoplay.globo.com/v/6164582/